- Français
-
EnglishDeutschItaliaFrançais한국의русскийSvenskaNederlandespañolPortuguêspolski繁体中文SuomiGaeilgeSlovenskáSlovenijaČeštinaMelayuMagyarországHrvatskaDanskromânescIndonesiaΕλλάδαБългарски езикGalegolietuviųMaoriRepublika e ShqipërisëالعربيةአማርኛAzərbaycanEesti VabariikEuskeraБеларусьLëtzebuergeschAyitiAfrikaansBosnaíslenskaCambodiaမြန်မာМонголулсМакедонскиmalaɡasʲພາສາລາວKurdîსაქართველოIsiXhosaفارسیisiZuluPilipinoසිංහලTürk diliTiếng ViệtहिंदीТоҷикӣاردوภาษาไทยO'zbekKongeriketবাংলা ভাষারChicheŵaSamoa日本語SesothoCрпскиKiswahiliУкраїнаनेपालीעִבְרִיתپښتوКыргыз тилиҚазақшаCatalàCorsaLatviešuHausaગુજરાતીಕನ್ನಡkannaḍaमराठी
PMIC expliqué : Fonctions, Types et Applications
Catalogue
Explorer le PMIC
Un PMIC (circuit intégré de gestion de l'alimentation) est un CI dédié qui accepte une ou plusieurs entrées de puissance et produit plusieurs rails d'alimentation régulés et contrôlés pour les différentes charges sur une carte. Ces charges incluent souvent des processeurs, de la mémoire, des sections RF, des capteurs et divers périphériques.
Au lieu de disperser des régulateurs discrets et des CI de supervision dans le design, un PMIC les consolide en un seul gestionnaire de domaine de puissance coordonné. Pour de nombreuses équipes, cette consolidation apporte également une certaine tranquillité d'esprit lors de la mise en service, car il existe un seul endroit à consulter lorsque les rails se comportent de manière étrange.
Processeurs, mémoire, blocs RF, capteurs et autres charges.
Portée fonctionnelle
Dans les produits réels, la contribution d'un PMIC va bien au-delà de la conversion de tension. Le bénéfice pratique se manifeste lorsqu'il se comporte comme un coordinateur de puissance au niveau système qui relie plusieurs responsabilités qui interagissent naturellement pendant le démarrage, les étapes de charge en cours d'exécution et les conditions de défaut.
Conversion
Un PMIC peut combiner différents types de régulateurs afin que les rails de puissance axés sur l'efficacité et les rails de puissance sensibles au bruit puissent être optimisés séparément. Dans les conceptions pratiques, la principale préoccupation n'est souvent pas de générer la tension requise, mais de maintenir une tension stable pendant les variations de charge, les événements de démarrage et d'autres conditions de fonctionnement exigeantes.
Régulateurs abaisseurs, régulateurs élévateurs, régulateurs abaisseur-élévateur et régulateurs LDO.
Un rail qui semble propre à une charge stable peut devenir visiblement stressé sous de vrais profils. L'efficacité, le ripple, la réponse transitoire et la marge thermique sont souvent examinés de près lorsque les courants de burst du CPU, les impulsions de transmission RF ou les pics d'échantillonnage des capteurs sont testés dans des conditions de fonctionnement réelles.
Éclats de CPU, impulsions de transmission RF et pics d'échantillonnage de capteur.
Distribution
Après que les rails sont générés, un PMIC dicte souvent comment ils sont partagés, commutés et isolés. C'est là que le design peut sembler soit robuste soit fragile, surtout lors des événements de connexion à chaud, de baisse de tension et liés au câble. Lorsque la distribution est gérée de manière réfléchie, l'inrush est contrôlé, les chemins de retour sont contraints, et un défaut est moins susceptible de se propager en un effondrement généralisé de la carte.
Activation des rails, interrupteurs de charge, limitation de courant et ORing diode idéale pour des entrées à sources multiples.
Détection et supervision
La plupart des PMIC intègrent des superviseurs qui surveillent en continu la santé des rails et fournissent des signaux que le firmware et le matériel peuvent interpréter. Dans un laboratoire, ces fonctionnalités cessent rapidement de sembler être de simples options supplémentaires et commencent à sembler être la différence entre une session de débogage propre et une journée passée à poursuivre un reset qui refuse de se reproduire à la demande.
Moniteurs de sous-tension, moniteurs de surtension, détection de surintensité, détection thermique et signalisation de bon fonctionnement.
Une leçon qui a tendance à rester gravée dans l'esprit des équipes expérimentées est que les seuils de bon fonctionnement et le timing de déglitch doivent être clairs. Lorsqu'ils sont vagues ou mal adaptés au système, le résultat est souvent des réinitialisations erronées ou des échecs de démarrage fantôme qui n'apparaissent qu'aux extrêmes de température, sur certaines batteries, ou après une séquence de redémarrages rapides.
Contrôle et séquençage
Un PMIC inclut souvent des mécanismes pour façonner la manière dont les rails montent, descendent et se coordonnent entre eux. Ces détails se traduisent par des résultats concrets : que ce soit un système qui démarre de manière répétable, si les composants subissent un stress évitable, et si la carte revient à un état connu après un défaut.
Séquençage, démarrage progressif, façonnage de rampe, chemins de décharge et timing inter-rails configurable.
Un système numérique ne demande généralement pas seulement des tensions de régime permanent correctes ; il s'attend également à ce que ces rails arrivent dans un ordre particulier et dans des relations temporelles limitées. Si les pentes sont trop abruptes, trop lentes, ou simplement mal ordonnées, des structures internes et des domaines peuvent se retrouver dans des conditions indéfinies qui sont désespérément intermittentes, en particulier autour du comportement de rétention de la SRAM et du démarrage d'interface haute vitesse.
Structures ESD internes, domaines de rétention SRAM et interfaces haute vitesse.
Ce qui façonne souvent les résultats dans les conceptions réelles
Lorsqu'une équipe passe d'un diagramme de blocs à un prototype fonctionnel, le choix et la configuration du PMIC réussissent ou échouent souvent sur des détails opérationnels plutôt que sur des spécifications de niveau marketing. Les problèmes subtils sont ceux qui créent une pression sur le calendrier, car ils apparaissent tard et se présentent rarement comme une seule cause racine évidente.
Faire face à des transitoires rapides et à des charges dynamiques
Les processeurs modernes et les sections RF peuvent exiger de grandes étapes de courant sur des échelles de temps de microsecondes. Un PMIC peut sembler parfaitement acceptable sur le papier et montrer néanmoins un affaissement, un dépassement ou des oscillations une fois que la boucle de contrôle, l'approche de compensation, le réseau de sortie et les parasitiques de l'PCB sont contraints d'interagir dans la disposition réelle.
Affaissement, dépassement et oscillation.
Les équipes qui testent la réponse transitoire tôt le font souvent parce qu'elles ont ressenti la douleur de la découvrir tard. Une validation précoce peut réduire les chances d'un cycle de redesign inconfortable impliquant des inducteurs, des condensateurs de sortie, des composants de compensation, ou même le choix du PMIC lui-même.
Inducteurs, condensateurs, composants de compensation et le PMIC lui-même.
Séquençage en tant que contrat système, pas comme une commodité
Le séquençage de puissance fonctionne mieux lorsqu'il est traité comme un contrat à travers les exigences en silicium, les hypothèses de firmware et le comportement de la carte. Lorsque les taux de montée et les délais de bon fonctionnement dérivent de ce que le cahier des charges du processeur attend, ou de ce que le firmware suppose implicitement, des problèmes de démarrage intermittents tendent à apparaître.
Exigences du cahier des charges du processeur et attentes du firmware.
Ce qui rend ces problèmes particulièrement frustrants est leur tendance à disparaître dans des conditions amicales au banc et à revenir lors d'extrêmes de température, d'événements de connexion à chaud de batterie, ou de conditions d'alimentation marginales. Dans ces environnements, un séquençage déterministe et un comportement de réinitialisation prévisible réduisent les surprises et raccourcissent les cycles de débogage.
Extrêmes de température, événements de connexion à chaud de batterie et conditions similaires à une coupure de courant.
Comportement de protection en tant que levier de disponibilité et de coût de service
Les limites de surintensité, l'arrêt thermique et les protections UV/OV sont souvent discutés dans le langage de la sécurité, mais les produits déployés les expérimentent comme des fonctionnalités de disponibilité. Un PMIC qui limite le courant de manière élégante, signale les défauts avec suffisamment de clarté pour être actionnables, et se remet de manière contrôlée peut empêcher un échec mineur d'un périphérique de se transformer en une panne système complète et en un ticket de support.
Mécanismes de protection : protection contre la surintensité, arrêt thermique, protection contre la sous-tension et protection contre la surtension.
Avantages de la fiabilité du système : limitation élégante du courant, rapport des défauts et récupération contrôlée.
Il est souvent plus précis, et franchement plus utile lors des compromis de conception, de considérer le PMIC comme une partie de l'architecture de fiabilité du système plutôt que comme simplement un convertisseur de puissance. Les conceptions qui vieillissent bien tendent à choisir un PMIC en fonction de la manière dont il impose de manière cohérente des états d'alimentation prévisibles à travers le fonctionnement normal, le traitement des défauts et les transitions.
Lorsque ce point de vue est pris au sérieux, les détails qui sont faciles à minimiser lors de la planification précoce commencent à être perçus différemment lors de l'intégration. Le comportement de décharge des rails, l'intégrité du signal de bon fonctionnement et la télémétrie des défauts deviennent les traits qui distinguent un appareil qui s'allume simplement dans le laboratoire d'un appareil qui démarre proprement, de manière répétée et prévisible sur le terrain, sans demander à l'équipe d'ingénierie de tenter sa chance.
Catégories de PMIC
Les PMICs sont souvent étiquetés par une fonction principale, mais dans le matériel expédié, ils ont tendance à se comporter comme un sous-système d'alimentation compact et coordonné plutôt que comme un composant à usage unique. Une manière pratique de classer les types de PMIC est de regarder (a) ce qu'ils régulent, (b) ce qu'ils contraignent ou appliquent, et (c) ce qu'ils connectent, déconnectent ou entraînent activement. D'un point de vue de l'activation du système, la ligne de séparation qui réapparaît est moins une question de linéaire contre commutation et plus une question de savoir si le PMIC a été conçu pour gérer l'interaction rail à rail sous une charge variable. Lorsque cette interaction est gérée de manière réfléchie, les cartes se sentent plus calmes pendant les tests de stress ; lorsque ce n'est pas le cas, le même design peut sembler correct sur une alimentation de banc et devenir capricieux dans un produit entièrement assemblé.
Regroupements fonctionnels principaux
Ces blocs génèrent des rails, définissent des points de fonctionnement et absorbent les changements dans les conditions d'entrée. Ils couvrent généralement tout, des rails silencieux à faible courant aux domaines numériques à fort courant.
• Régulation linéaire (LDOs)
• Régulation par commutation (buck, boost, buck-boost, inversant, pompes de charge)
• Conversion avant et pré-régulation (adaptateurs AC/DC, étapes de sink USB-PD, pré-régulateurs automobiles sur certaines plateformes)
Ces blocs façonnent la manière dont l'alimentation est autorisée à se comporter en définissant des seuils, en surveillant des limites et en réagissant aux défauts. Ils ne délivrent peut-être pas des watts, mais ils décident souvent si un système échoue de manière claire ou mystérieuse.
• Références de tension et bandes de décalage
• Superviseurs, moniteurs et comparateurs de fenêtres
• Génération de réinitialisation, minuteries de surveillance et détection de sous-tension
• Séquençage, suivi et réponse aux défauts (UV/OV, surcourant, réponse thermique)
Ces blocs déterminent où l'énergie circule, quand elle est isolée et comment les charges externes sont alimentées. Dans des conceptions réelles, ils sont souvent là où les cas limites, le branchement à chaud, la chute de câble, les défauts d'accessoires, tendent à apparaître en premier.
• Gestion du chemin d'alimentation
• Interrupteurs de charge et eFuses
• Charge de batterie
• Rails et pilotes liés à l'affichage
• Pilotes de port de MOSFET
Types de régulation/conversion
Les LDOs sont couramment sélectionnés lorsque le bruit de sortie faible, un flux de conception simple et un comportement de petit signal rapide sont souhaitables. On les retrouve fréquemment sur des blocs RF, des rails audio, des capteurs de précision et des alimentations liées aux références ADC où les ondulations peuvent se transformer en pertes de performance mesurables.
La chaleur est souvent le facteur limitant dans la performance des régulateurs. À mesure que la différence de voltage d'entrée à sortie augmente ou que le courant de charge augmente, la dissipation de puissance et la température peuvent devenir plus importantes que les spécifications d'exactitude électrique.
Un rail d'alimentation qui semble stable lors des tests en banc ouvert peut développer des problèmes significatifs de chauffage à l'intérieur de systèmes fermés ou d'environnements à haute température où le flux d'air et les marges thermiques sont réduits.
Les convertisseurs buck supportent une grande partie de la charge pour des rails de cœur efficaces : processeurs d'application, DSP, rails DDR et autres domaines numériques à fort courant. En pratique, deux cartes utilisant le même buck peuvent se comporter très différemment selon le mode de contrôle, les modes de fonctionnement à faible charge et les parasitiques liés à la disposition.
• Approche de contrôle (mode de tension, mode de courant, hystérétiques, temps d_ON constant)
• Comportement à faible charge (PFM, saut de pulse, PWM forcé)
• Réponse transitoire contre compromis d'ondulation de sortie
• Posture EMI (options de spectre étalé, choix de fréquence de commutation, sensibilité de la disposition)
Un détail qui tend à affiner les revues de conception est la réalité du profil de charge. Un convertisseur qui semble excellent à 2 A peut passer la plupart de sa vie à 20–200 mA, où les transitions de mode, la perte de charge de porte et les frais généraux de commutation dominent. Comparer uniquement les valeurs d'efficacité maximale peut entraîner une durée de vie de la batterie en opération réelle pire que prévu par les estimations initiales.
Les convertisseurs boost sont généralement appliqués lorsque le rail cible doit dépasser la source, des exemples courants incluent la génération de 5 V à partir d'une batterie à cellule unique, la création de rails de polarisation d'affichage ou l'alimentation de chaînes LED. Les topologies buck-boost sont privilégiées lorsque l'entrée peut dépasser et descendre au-dessous de la sortie désirée, par exemple, en maintenant un rail de système stable à travers l'ensemble de la courbe de décharge de la batterie.
Ces convertisseurs souvent dénouent des maux de tête au niveau système, comme garder un domaine de 5 V stable pendant que la batterie s'affaisse, mais ce soulagement s'accompagne de plus de pièces mobiles : complexité de compensation, comportement de limite de courant de commutation, et EMI conduites qui peuvent être étonnamment sensibles à la géométrie de la carte et aux conditions de câble.
Dans les téléphones et les petits modules IoT, le bloc AC/DC est généralement à l'extérieur du produit, mais la négociation de l'avant et la protection d'entrée se trouvent de plus en plus à l'intérieur de l'appareil. Même lorsque une fiche technique commercialise cela comme des fonctionnalités USB plutôt que des fonctionnalités PMIC, elles façonnent fortement le dimensionnement des convertisseurs en aval, la distribution de chaleur et le stress du pire cas.
• Détection USB-PD et prise en charge de la négociation
• Limitation de courant d'entrée et contrôle de l'inrush
• Protection contre les surtensions pour les accessoires et adaptateurs USB
Blocs de support de précision
La référence d'ancrage précise pour les ADC, DAC et seuils de comparateur. Dans les produits à signaux mixtes, les détails qui comptent à plusieurs reprises sont le comportement de dérive, la densité de bruit et le PSRR sur la plage de fréquences pertinente. Cela peut sembler contre-intuitif, mais une petite quantité de bruit de référence peut se manifester sous forme de gigue mesurable, d'erreur de capteur ou d'ambiguïté de seuil une fois multipliée par les choix de gain et de filtrage dans le monde réel.
Les superviseurs surveillent les rails pour des violations de sous-tension, de surtension et de séquençage. Dans les systèmes multi-rails, ils aident à éviter les états à moitié actifs où un domaine se met en marche et commence à s'exécuter pendant qu'un autre domaine est en retard, brun, ou oscille.
D'un point de vue de fiabilité, une surveillance robuste tend à réduire le type de retours intermittents sur le terrain qui frustrent tout le monde : des problèmes qui apparaissent uniquement lors de démarrages à froid, de lancements à faible tension de batterie, d'événements de branchement rapide ou de câbles borderline qui n'étaient jamais dans le "chemin heureux" du laboratoire.
Le séquençage est plus que rail A puis rail B. Cela se transforme en une discussion sur les tolérances de timing, les pentes de montée, les relations de réinitialisation et ce que le système fait lorsqu'un rail manque sa fenêtre.
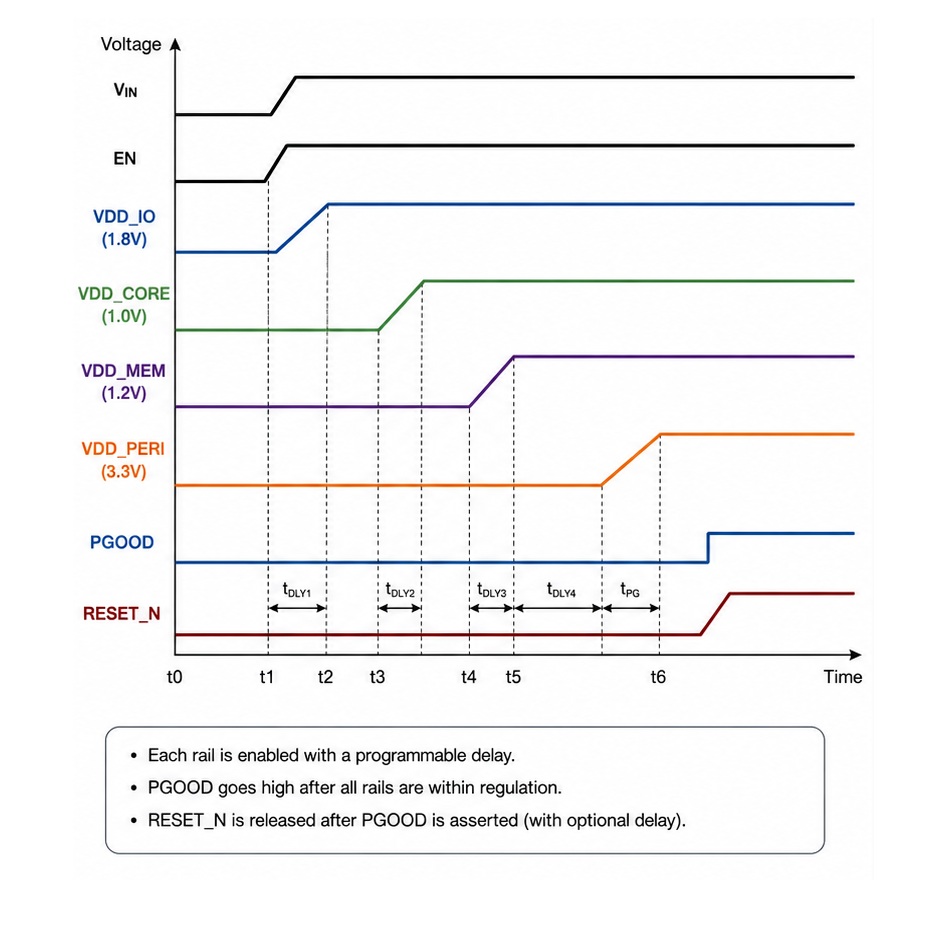
La documentation SoC spécifie souvent des dépendances IO-before-core, des contraintes de formation de mémoire et un timing précis de désassertion de réinitialisation. Les PMIC avec séquençage programmable et montées contrôlées peuvent réduire la logique externe et rendre la mise en route moins comme un travail de devinette, surtout lorsque les cartes itèrent rapidement et que de petits changements de timing peuvent économiser des jours de débogage.
Chemin d'alimentation et fonctions de commande
La logique de chemin d'alimentation décide si le système fonctionne à partir de l'USB, de la batterie ou d'un mélange des deux, et elle influence ce qui se passe lors des transitions.
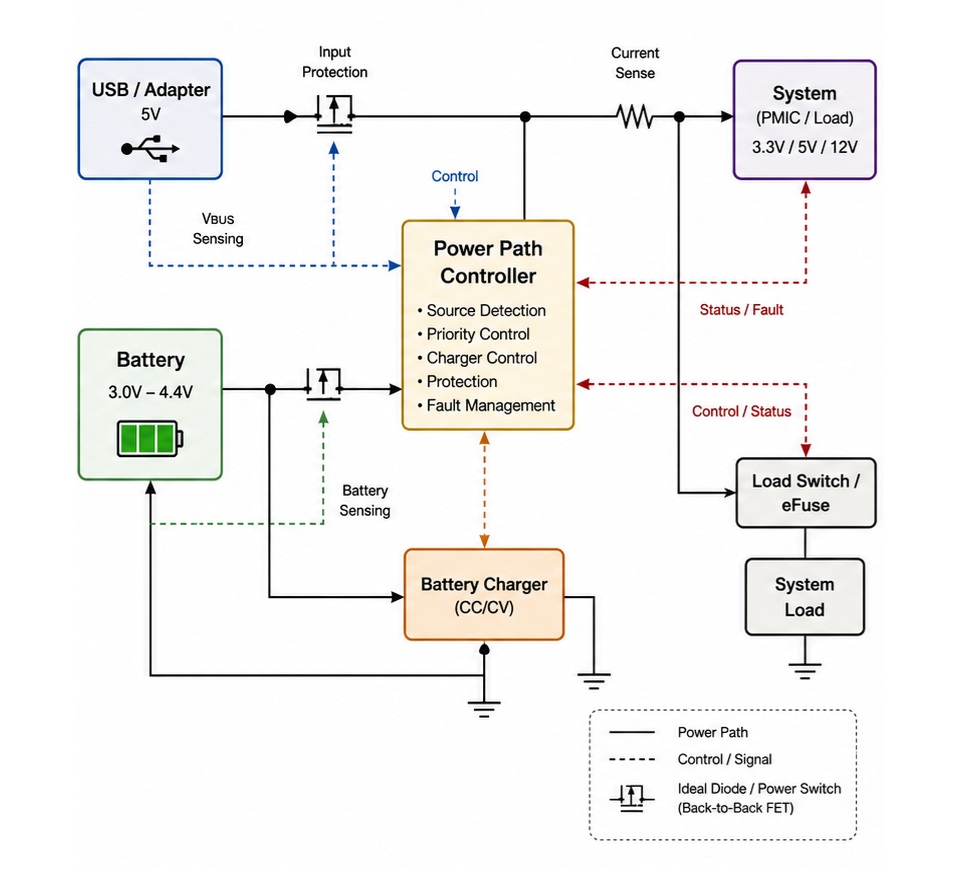
• Comportement de commutation sans couture (limitation des décroissances qui déclenchent des réinitialisations)
• Limitation de courant d'entrée pour correspondre aux adaptateurs USB et aux contraintes de conformité
• Comportement de diode idéale pour réduire le courant inverse
Un piège courant dans le monde réel est de sous-estimer la résistance dans les câbles, connecteurs et éléments de protection. Lors d'un transitoire rapide, le PMIC peut se comporter exactement comme conçu et le système peut quand même subir une chute de tension parce que le chemin en amont s'affaisse plus que le modèle ne l'a supposé. Ces échecs semblent "injustes" jusqu'à ce que l'impédance complète du chemin soit mesurée et considérée comme une partie de la conception, et non comme une note de bas de page.
Les chargeurs varient en fonction du support de chimie de batterie, de la topologie de circuit, des caractéristiques thermiques et des objectifs de conception. Les priorités communes incluent un chargement plus rapide, une température de surface plus basse, une réduction de l'EMI, ou le maintien de la performance du système pendant la charge.
• Chargeurs linéaires
• Chargeurs à découpage
• Modes de banque d'alimentation/OTG
Le choix se réduit souvent à un budget thermique, des contraintes réglementaires ou d'interopérabilité, et si l'appareil est censé maintenir une performance complète pendant la charge sans se sentir lent ou surchauffer.
Les interrupteurs de charge sont couramment utilisés pour réguler les rails pour la réduction de puissance en veille et pour isoler les domaines pendant des états de faute ou d'expédition. Les eFusibles ajoutent des limites de courant programmables, des temporisateurs de panne, et un comportement de mise sous tension contrôlé.
Dans de nombreux produits, ces blocs rentabilisent leur surface de carte en transformant des modes de défaillance désordonnés, des courts-circuits de connecteurs, des erreurs d'accessoire, des événements de branchement incorrects, en incidents contenus au lieu de réinitialisations en cascade ou de dommages physiques coûteux à diagnostiquer et encore plus difficiles à reproduire.
Les systèmes d'affichage nécessitent souvent plusieurs rails d'alimentation tels que AVDD, VGH, et VGL avec une séquence de démarrage soigneusement contrôlée pour éviter des artefacts d'affichage visibles. Les pilotes LED doivent également réguler le courant avec précision et répondre de manière fiable aux défauts de chaîne ouverte et de court-circuit car ces conditions se produisent couramment pendant l'opération.
Les pilotes de porte et les étapes de puissance plus élevées deviennent de plus en plus pertinents dans la robotique, l'automobile, et les équipements industriels, où le contrôle des moteurs et la conversion à haute tension croisent la coordination, la télémétrie et les politiques de protection de style PMIC.
Le PMIC "Typique" pour Téléphone/IoT
Dans de nombreux téléphones et modules IoT compacts, un PMIC est mieux compris comme un mélange délibéré de blocs plutôt que comme une seule catégorie. L'intégration vise généralement à réduire la surface de PCB, à simplifier le séquençage, et à donner au firmware un seul endroit pour observer et influencer le comportement de l'alimentation.
• Plusieurs convertisseurs buck à haute efficacité pour CPU, GPU, mémoire et rails toujours actifs
• Un ou plusieurs LDO pour des rails analogiques et RF à faible bruit
• Circuits de charge et de chemin d'alimentation pour coordination USB et batterie
• Moniteurs, séquenceurs, contrôles thermiques et rapports d'interruption pour télémétrie et gestion des pannes
Ce qui tend à dominer les résultats est l'interaction des rails. Un buck transitoire peut se coupler à un LDO RF via une impédance de masse partagée. Le repli thermique du chargeur peut discrètement abaisser le courant disponible du système, et ce changement peut tirer un rail central dans une chute pendant un pic de charge de travail. Les conceptions qui évaluent chaque bloc en isolation ont souvent l'air propre lors des premiers tests sur banc, puis deviennent délicates lors des tests de stress intégrés, lorsque tout commute, chauffe et négocie simultanément.
Sélection et Intégration
Les régulateurs de commutation sont généralement choisis pour réduire la dissipation, mais ils peuvent introduire du ripple et des EMI qui se répandent dans des domaines sensibles. Les LDO apaisent souvent le bruit, mais le coût se manifeste sous forme de chaleur lorsque la marge de tension est généreuse ou que le courant n'est pas trivial.
• Régulateurs de commutation : efficacité plus élevée, plus de travail de gestion du ripple/EMI
• LDO : bruit plus faible, dissipation de chaleur plus élevée lors de la chute de tension
Un compromis qui fonctionne souvent bien consiste à utiliser un buck pour créer un rail intermédiaire, puis à utiliser un LDO pour le rail sensible final, tant que la marge de manœuvre et le comportement thermique ont été planifiés délibérément au lieu d'être laissés de côté après d'autres décisions.
Les changements de charge rapides nécessitent des boucles de contrôle rapides, une conception de compensation adéquate, et une capacité de sortie suffisante pour maintenir une régulation stable pendant les premiers microsecondes de réponse. La sélection de condensateurs implique plus que simplement augmenter la capacité. La capacité effective peut diminuer en raison du biais DC, des variations de température et du vieillissement. L'ESR et l'ESL affectent également la stabilité du circuit, la réponse transitoire et les performances EMI, ce qui en fait d'importantes considérations de conception.
Les équipes qui valident avec le diélectrique de condensateur exact, la tension nominale et la taille de boîtier prévue pour la production tendent à éviter les surprises de stabilité à un stade avancé, surtout lorsque les chaînes d'approvisionnement forcent des substitutions équivalentes qui ne sont équivalentes que sur le papier.
Le comportement du PMIC en cas de défaut peut être conçu autour de différentes philosophies. Une approche tente une dégradation gracieuse, la gestion des baisses de tension, les indications de limitation à processeur, la réduction sélective des rails, de sorte que le système reste utilisable en mode réduit. Une autre approche impose un arrêt déterministe pour atteindre rapidement un état sûr connu.
• Dégradation gracieuse : souvent alignée avec les objectifs d'expérience utilisateur dans les produits de consommation
• Arrêt déterministe : souvent aligné avec un comportement prévisible dans des conceptions axées sur la sécurité
Le PMIC qui convient le mieux est généralement celui dont la séquence et les réponses aux défauts correspondent au comportement prévu du produit, et non celui qui a la plus longue liste de contrôle annoncée.
Des fréquences de commutation plus élevées et des étages d'alimentation à large bande interdite augmentent la densité de puissance réalisable, mais elles créent également des exigences de mise en page PCB plus strictes et une sensibilité EMI accrue. En même temps, des fonctionnalités logicielles telles que la télémétrie, les interruptions, les fonctions de journalisation et les politiques de contrôle programmables deviennent des facteurs importants dans la gestion et l'intégration globales des systèmes d'alimentation.
Les PMIC qui maintiennent un comportement de puissance prévisible sous des charges de travail réelles peuvent considérablement réduire le temps de débogage, en particulier dans les systèmes gérant simultanément des radios, des processeurs, des opérations de charge et des limites thermiques.
Portée de l'application PMIC
Les PMIC apparaissent partout où l'énergie électrique doit être convertie, distribuée, séquencée, observée et protégée tout en maintenant les pertes et l'interférence sous contrôle. Ils sont couramment utilisés dans les conceptions de consommation, d'entreprise, automobiles et industrielles, mais la ligne de partage n'est généralement pas le marché final, c'est ce à quoi ressemble l'arbre d'alimentation en pratique. Au moment où un produit contient plusieurs rails avec différentes tolérances au bruit, des comportements de charge variable et des attentes de défaut différentes, le PMIC ne semble plus être un « choix de pièce » et commence à agir comme une force de modelage sur le comportement du système. Dans de nombreuses conceptions réelles, une fois un processeur haute performance associé à des radios, capteurs, mémoire et E/S haute vitesse, l'architecture de puissance finit par limiter ce que la plateforme peut fournir de manière cohérente, même lorsque le calcul et le logiciel semblent solides sur papier.
Où le comportement du PMIC limite les résultats des systèmes du monde réel
Réponse transitoire de charge qui fixe discrètement le plafond
Les CPU et GPU modernes tirent des étapes de courant abruptes pendant les activités de boost et de burst, et ces étapes peuvent être étonnamment impitoyables. Lorsque la boucle de contrôle du PMIC, la capacité de sortie et l'impédance de distribution ne peuvent pas maintenir le rail dans des limites serrées, les équipes logicielles répondent souvent de manière subtile mais coûteuse : elles raccourcissent les fenêtres de boost, réduisent les horloges de pointe ou insèrent des bandes de protection plus larges pour que les pannes ne se manifestent pas sur le terrain. Du point de vue de l'ingénierie, ce compromis peut sembler frustrant car la plateforme peut sembler efficace tout en laissant encore des performances de côté dans un trafic réaliste.
Les équipes qui ne valident qu'avec des charges statiques ou des modèles de laboratoire soignés ont tendance à apprendre cela tard. Les charges de travail réelles créent des bords irréguliers : des pics de jeu courts, des pics d'inférence AI et des événements de coexistence radio peuvent produire des chutes de tension qui n'apparaissaient jamais lorsque la ligne était exercée avec un profil de banc bénin. La leçon inconfortable est que le comportement transitoire répétable sous des charges de travail désordonnées achète souvent plus de performance utilisable que la chasse à un chiffre d'efficacité flatteur à un seul point de fonctionnement.
Ondulations et bruit large bande qui se transforment en dettes d'intégrité du signal
Les ondulations ne devraient pas être considérées uniquement comme un paramètre de performance analogique. Les harmoniques de commutation et le bruit large bande peuvent affecter la résolution de l'ADC, augmenter le bruit de phase RF et réduire la marge de signal SERDES, surtout lorsque les rails d'alimentation partagent des chemins de retour ou se couplent par inductance du package et du PCB. Un rail d'alimentation qui semble propre lors de tests à rail unique peut se comporter très différemment près d'interfaces à haute vitesse, d'antennes ou de sections de mémoire denses.
Les réalités de la mise en page changent également l'histoire. Les contraintes mécaniques et les zones à éviter forcent des compromis, et ces compromis peuvent amplifier des chemins de couplage qui étaient invisibles dans une mise en page idéale. En pratique, une solution d'alimentation gagne la confiance lorsqu'elle reste stable et silencieuse sous un placement imparfait et un routage non idéal, pas seulement lorsqu'elle est mesurée dans une configuration de démonstration en meilleure situation.
Démarrage et séquençage qui façonnent les résultats de fiabilité
L'ordre de montée en puissance et le comportement de la rampe décident si l'entraînement de la mémoire se termine de manière cohérente, si les radios se calibrent sans échecs étranges aux coins, et si les domaines toujours actifs restent stables lors de coupures de courant. Un séquençage marginal produit souvent le genre de motif d'échec qui épuise le temps et le moral : "un démarrage sur cinquante", difficile à reproduire et encore plus difficile à déboguer une fois le système complètement intégré.
Le séquençage a tendance à mieux fonctionner lorsqu'il est géré comme partie du comportement de réinitialisation et de récupération plutôt que comme une liste de contrôle tardive. Les conceptions qui tiennent en production traitent généralement le chemin complet de montée/descente de puissance comme une machine d'état répétable, puis le prouvent sous des taux de rampe au pire cas, à des températures froides et dans des conditions de batterie faible. Le cyclage d'alimentation automatisé est souvent là où la confiance est gagnée, car il expose les bords intermittents qu'un simple basculement d'alimentation manuel ne révèle jamais.
Critères de sélection en tant qu'espace d'échange du système
Efficacité évaluée à travers les modes, pas comme un chiffre de trophée
L'efficacité change de signification en fonction de la façon dont le produit passe réellement son temps. L'efficacité en charge maximale peut sembler impressionnante dans les spécifications, mais la durée de vie réelle de la batterie et la performance thermique dépendent de nombreuses conditions de fonctionnement, y compris le traitement par rafales, la charge normale, la légère charge et le fonctionnement en sommeil profond. Les pertes de commutation, les pertes de conduction et le courant au repos rivalisent différemment dans chaque région, et le "gagnant" change avec le profil de charge de travail.
Pour les conceptions alimentées par batterie, un Iq faible et une forte efficacité en légère charge se traduisent souvent directement par un temps plus long entre les charges, ce qui intéresse les équipes produit de manière très concrète. Pour les serveurs et le matériel réseau, les pertes de conduction et les contraintes thermiques dominent généralement car le courant soutenu et l'évacuation de chaleur deviennent la réalité quotidienne. Une manière pragmatique de décider est de cartographier les objectifs d'efficacité sur la distribution temporelle des charges de travail, au lieu d'optimiser un point de fonctionnement qui presque jamais ne se produit sur le terrain.
Marge thermique qui empêche la performance de s'effondrer sous la chaleur
Les limites thermiques définissent fréquemment le courant maximal soutenable, qui à son tour définit le calcul maximal soutenu. Un PMIC peut sembler électriquement excellent et manquer pourtant des objectifs système si son package, son cuivre et son placement créent des points chauds locaux près de la mémoire, des boîtiers de blindage ou des blocs RF sensibles à la température. Dans les assemblages réels, de petites élévations de température peuvent déclencher un comportement de dégradation, des seuils de protection ou des préoccupations de fiabilité à long terme que personne ne veut expliquer après le lancement.
Les conceptions qui vieillissent bien prévoient généralement une marge thermique. Cette planification se manifeste souvent par des caractéristiques thermiques du package qui correspondent à la charge, une capacité multi-phase lorsque le profil de courant le justifie, et une stratégie de mise en page qui disperse la chaleur tout en gardant les boucles de courant suffisamment courtes pour éviter de transformer des solutions thermiques en problèmes de bruit.
Contraintes EMI qui gonflent le coût du calendrier et des itérations
La fréquence de commutation, les taux de montée et la topologie de contrôle influencent fortement si l'EMI peut être géré avec un filtrage simple ou devient un cycle de révisions de circuit imprimé et de sessions de laboratoire tard dans la nuit. La conformité aux fiches techniques n'est qu'une partie de l'histoire ; la sensibilité de la mise en page peut dominer les résultats. Une solution qui exige une géométrie de boucle presque parfaite peut devenir un pari lorsque des contraintes mécaniques forcent un placement maladroit.
De nombreuses équipes finissent par préférer une solution légèrement plus lente et plus contrôlable, avec des taux de montée gérables et un comportement spectral prévisible, car cela réduit le temps de débogage et diminue le risque de certification. Ce choix peut sembler conservateur, mais il s'aligne souvent avec la réalité selon laquelle les problèmes EMI ont tendance à se manifester tard, lorsque le calendrier est le moins clément.
Caractéristiques de protection qui définissent l'expérience de défaut et le comportement de service
Le comportement de protection affecte fortement la réponse du système en cas de conditions de défaut. Les réglages OCP, OVP, OTP et de protection contre les courts-circuits peuvent déterminer si le système effectue un arrêt propre, entre en mode verrouillé ou redémarre de manière répétée avec un comportement instable. Ces réponses affectent directement la difficulté de dépannage, les exigences de support et la perception globale de la fiabilité du produit.
Les réglages de protection interagissent également avec les événements de fonctionnement normal. Une limitation de courant agressive peut réduire le risque de dommages, mais elle peut aussi déclencher des réinitialisations répétées pendant les moments de pic de courant à l'allumage ou de génération d'énergie. La gestion des défauts fonctionne généralement mieux lorsqu'elle est ajustée dans le cadre de la stratégie de service prévue, décidant de ce qui doit être réessayé, de ce qui doit se verrouiller, de ce qui doit être enregistré et de ce qui doit échouer rapidement, plutôt que de rester en tant que valeurs par défaut des registres.
Coût d'intégration qui inclut le firmware, la validation et la réalité du débogage
Le coût d'intégration ne s'arrête que rarement au niveau du BOM et de la surface du PCB. Il inclut le travail sur le firmware, l'étendue de la validation, le temps de test, la robustesse de fabrication et la charge de débogage lorsqu'un élément ne se comporte pas comme prévu. Les PMICs hautement intégrés peuvent réduire le nombre de composants, ce qui est attrayant, mais ils concentrent également le risque : un ajustement tardif sur un rail peut déclencher la requalification d'une plus grande partie de l'arborescence d'alimentation que l'équipe ne l'avait prévu.
Des approches plus discrètes peuvent augmenter l'effort de mise en page et la gestion des pièces, mais elles peuvent également offrir une modularité et un remplacement plus facile si les conditions de la chaîne d'approvisionnement changent ou si des mises à jour en cours de vie sont attendues. La lentille de sélection la plus honnête est l'appétit pour le risque du programme : la sensibilité au calendrier, le nombre d'itérations prévu et la fréquence à laquelle le design est susceptible d'être révisé après le premier lancement.
Caractéristiques d'alimentation numérique : flexibilité avec des conditions attachées
La télémétrie, les rails programmables et la mise à l'échelle dynamique de la tension peuvent apporter de réels avantages : optimisation de l'alimentation plus serrée, diagnostics de défauts plus clairs et mise à l'échelle de performances adaptatives qui suivent la charge de travail et la température. En même temps, ces fonctionnalités nécessitent des dépendances de firmware, un contrôle de configuration, une discipline de programmation de production et des modes de défaillance totalement nouveaux qui n'existent pas dans des configurations analogiques plus simples. La télémétrie ne devient précieuse que lorsque les données collectées sont activement utilisées pour la surveillance et les décisions de conception, plutôt que de rester inutilisées dans des tableaux de bord de diagnostic.
D'un point de vue pratique, l'alimentation numérique justifie son existence lorsqu'elle ferme une boucle mesurable. Si la programmabilité peut être utilisée pour récupérer des rendements, prolonger la durée de vie de la batterie ou prévenir le throttling thermique avec des politiques contrôlées, elle devient un levier puissant. Si elle est activée simplement parce qu'elle est disponible, elle se transforme souvent en surface de configuration inutilisée qui complique la validation, augmente le risque de mauvaise configuration de fabrication et crée une ambiguïté quant aux réglages qui sont réellement intentionnés.
Un flux de sélection et de validation pratique qui suit le comportement du système
Un flux de travail qui a tendance à tenir sous pression commence par des cibles de comportement système plutôt que de scanner un catalogue de PMIC et d'espérer que l'ajustement fonctionne par la suite. Il divise le problème en morceaux concrets et testables et force la clarté sur ce que signifie un bon comportement avant le démarrage de la carte.
• Convertir les transitoires de charge de travail en exigences de rail (chute admissible, temps de stabilisation, courant de crête, taux de répétition).
• Définir des budgets de bruit pour les blocs sensibles (ADC, PLL, SERDES, RF) et les mapper aux limites de ripple et aux hypothèses de mise en page.
• Spécifier le séquençage, les dépendances de réinitialisation et la récupération après une coupure de tension comme une machine à états.
• Évaluer le risque EMI tôt en utilisant des contraintes de placement réalistes et l'approche de blindage prévue.
• Valider le comportement de protection avec une injection de défaut qui ressemble à de vrais courts-circuits, des événements de câble et des chutes de batterie.
ADC / PLL / SERDES / RF
Ce style d'approche réduit les surprises en fin de processus car il traite le PMIC comme le mécanisme qui gouverne le comportement d'alimentation au niveau du système, et non comme un utilitaire de fond. Lorsque l'alimentation est conçue comme un sous-système de première classe, les performances deviennent plus cohérentes, la fiabilité devient plus facile à défendre avec des données, et le travail de conformité tend à être plus prévisible, tandis que l'équipe passe moins de temps à chasser les défaillances intermittentes qui proviennent des rails plutôt que de la logique ou du logiciel.
Directions futures pour les PMICs
Une densité de puissance plus élevée et des tensions de cœur plus basses laissent les PMIC réguler avec une marge électrique plus serrée et moins de tolérance au retard. Alors que les rails d'alimentation se rapprochent du point de fonctionnement minimal d'une charge numérique, même un léger affaissement peut se manifester par des erreurs douces, des réinitialisations ou un ralentissement des performances qui semblent « mystérieux » lors de la mise sous tension du système. Cela déplace progressivement l'attention de la conception de la précision d'un rail à l'état permanent vers son comportement lors d'événements de charge rapides et de pire cas.
Les équipes se heurtent souvent à une réalité inconfortable : une boucle qui semble calme sur le banc peut toujours mal se comporter dans le produit une fois que de véritables charges créent des variations de charge brusques, des points chauds localisés et un partage de courant de phase inégal. Un schéma plus résilient consiste à traiter la conception de la boucle, les choix de puissance et l'impédance PDN comme un seul système couplé, puis à vérifier le comportement à l'aide de signatures de charge représentatives plutôt que de pulses propres et idéalistes.
Des transitoires plus rapides attirent naturellement les conceptions vers des boucles plus serrées, mais des boucles plus serrées exposent également les conceptions à une inductance parasitaire, à des empilements de tolérance et à un bruit de détection qu'il est facile de sous-estimer au début. Dans de nombreux programmes, la différence entre stable et stable sur le terrain provient d'une modélisation de petit signal améliorée, d'une détection de courant crédible et d'une compensation qui est réglée en tenant compte de la disposition réelle.
Augmenter la fréquence de commutation peut aider, mais cela ne se traduit pas automatiquement par un meilleur comportement transitoire si le chemin de détection et la géométrie de la carte PCB ne peuvent pas supporter la bande passante ajoutée. Lorsque ce décalage se produit, le gain de boucle est dépensé pour amplifier le bruit, ce qui peut se manifester par une commutation saccadée, des artefacts audibles dans certains modes de fonctionnement, ou des pics EMI qui n'apparaissent qu'après l'intégration mécanique.
Les blocs de calcul et de connectivité modernes génèrent une demande qui est éclatante et compositionnelle, donc la validation transitoire reflète de plus en plus ce que le logiciel et les radios font réellement plutôt que ce qu'une boîte de charge peut approximer avec une seule étape.
De nombreuses équipes convergent vers un flux de travail qui combine :
• Pas de charge en laboratoire
• Journaux de télémétrie de la plate-forme
• Mises à jour itératives des choix de compensation et de découplage.
Cette approche tend à réduire les surprises en fin de phase, en particulier lorsque les limites thermiques modifient lentement le comportement électrique et déplacent les marges au fil du temps.
La pression pour réduire la taille tout en améliorant les performances prolonge l'intégration dans le paquet et la structure environnante, pas seulement le die. Les emballages avancés et les passifs intégrés peuvent raccourcir les boucles à haut-di/dt, réduire les parasitiques et resserrer la réponse transitoire de manière à sembler immédiatement mesurable lors du débogage. Les composants magnétiques intégrés peuvent encore augmenter la densité de puissance, mais le bénéfice est souvent limité par les voies thermiques, les contraintes mécaniques et la façon dont le couplage change une fois que la conception est à l'intérieur de son véritable boîtier.
Dans les produits déployés, les gains les plus durables issus de l'intégration proviennent souvent de la réduction de la sensibilité aux variations de fabrication et de la stabilisation des performances à travers la dispersion de la fabrication, plutôt que de simplement réduire la liste des matériaux.
Le choix de l'emballage reflète de plus en plus les résultats électriques et thermiques, y compris une inductance de boucle plus faible, un meilleur étalement de la chaleur et un contrôle de l'impédance plus prévisible. Une leçon commune sur le terrain est que deux cartes partageant le même schéma peuvent diverger fortement dans leur comportement lorsque l'une des conceptions préserve une boucle de courant compacte et que l'autre disperse le chemin de puissance à travers le PCB.
À mesure que l'intégration du système augmente, la planification de la disposition est souvent priorisée plus tôt dans le développement car les modifications ultérieures des composants ne peuvent pas toujours corriger les problèmes causés par une mauvaise géométrie ou un routage de PCB.
Les composants magnétiques intégrés peuvent augmenter l'efficacité à des fréquences plus élevées et réduire la hauteur z, ce qui est attrayant dans les produits étroitement emballés. En même temps, ils peuvent introduire de nouveaux chemins de couplage et créer des points chauds thermiques qui sont difficiles à détecter jusqu'aux prototypes avancés. Les conceptions qui se déroulent sans problème traitent généralement l'inducteur et l'emballage comme un sujet de co-conception EMI et thermique combiné, y compris des décisions de placement près des antennes, des liaisons à haute vitesse et des capteurs sensibles.
La pratique EMI s'éloigne des atténuations purement statiques et vers des stratégies de contrôle qui anticipent les conditions de fonctionnement. Des techniques telles que la modulation par étalement de spectre, des pilotes de porte plus intelligents et une détection sur puce plus riche peuvent réduire les pics, mais elles nécessitent également une coordination pour éviter de simplement échanger des émissions de pic contre du bruit large bande ou des interférences radio.
De nombreuses équipes ont vu la séquence se dérouler : les premières vérifications EMI réussissent, puis les constructions ultérieures échouent lorsque plusieurs régulateurs commutent dans des motifs corrélés, lorsque un nouveau calendrier de firmware modifie le timing de charge, ou lorsque des câbles et des écrans déplacent les chemins de retour. Ces expériences orientent la réflexion EMI vers le niveau de plate-forme plutôt que de considérer chaque régulateur comme une boîte isolée.
À mesure que les bords de commutation deviennent plus rapides, le contrôle dv/dt influence de plus en plus les émissions et le stress à long terme. Les pilotes de porte ajoutent plus de programmabilité, et la logique de protection devient de plus en plus consciente du contexte, ce qui peut rendre le réglage plus semblable à l'ingénierie système qu'à la sélection de composants.
Une habitude pratique qui fait gagner du temps est de régler les taux de changement en utilisant des mesures prises dans la configuration mécanique finale, car le blindage, les harnais et les structures de mise à la terre modifient souvent le résultat EMI de manière qu'une carte nue ne révèle pas.
Un capteur amélioré sur puce permet des comportements adaptatifs tels que le changement de comportement de commutation lorsque les émissions approchent d'une limite ou lorsque le mode de fonctionnement change. Au fil du temps, cela déplace les PMICs d'un comportement à fonction fixe vers des sous-systèmes gérés qui négocient en continu les performances, le bruit et les conditions thermiques en fonction des retours plutôt que d'hypothèses.
Les systèmes alimentés par batterie continuent de viser un courant de repos ultra-bas et une forte efficacité à charge légère en utilisant des techniques comme le fonctionnement PFM/en rafale, l'émulation de diode et la sélection automatique de mode. La tension émotionnelle que de nombreuses équipes reconnaissent est que les mêmes modes à charge légère qui semblent excellents sur une fiche technique peuvent introduire des ondulations, des artefacts audibles ou des signatures EMI intermittentes qui sont immédiatement remarquées même si l'efficacité moyenne semble excellente.
Pour réduire l'ambiguïté, les équipes définissent de plus en plus ce que signifie un comportement de veille acceptable en termes concrets, puis choisissent une stratégie de mode pour s'adapter.
Les cibles spécifiées couramment incluent :
• Limites des ondulations en sommeil/veille
• Latence de réveil
• Contraintes acoustiques/sonores
• Comportement EMI pendant l'activité périodique d'entretien.
En pratique, la durée de vie de la batterie sous des cycles de travail réalistes raconte souvent l'histoire de manière plus fiable que les chiffres d'efficacité maximale, surtout lorsque le cycle de travail comprend le sommeil, les réveils périodiques, les rafales radio et l'échantillonnage des capteurs.
Le changement de mode automatique est attractif, mais les transitions peuvent créer de courtes perturbations qui disparaissent dans les mesures moyennes et ne se manifestent que sous forme de réinitialisations rares ou de plaintes de bruit intermittentes. Les conceptions qui semblent « solides » sur le terrain ont tendance à dépenser des efforts de validation supplémentaires précisément aux limites entre PFM et PWM, y compris la séquence de réveil, les délais de séquençage, et les étapes de charge en condition limite.
Un schéma répété est que le réglage d'efficacité le plus agressif n'est pas toujours le choix de produit le plus confortable lorsqu'il produit des ondulations qui varient selon les conditions ou des couplages de bruit qui sont difficiles à reproduire. De nombreuses équipes finissent par choisir une configuration qui abandonne une petite quantité d'efficacité en échange d'un comportement qui est répétable à travers la température, la variation de fabrication, et les scénarios, ce qui abaisse souvent le risque d'intégration et réduit le turn-over de support.
À mesure que les plates-formes de calcul se développent, elles s'appuient de plus en plus sur une télémétrie précise, un réglage de tension adaptatif, et une protection coordonnée entre de nombreux circuits. La télémétrie joue un rôle pratique dans l'ingénierie quotidienne : elle peut raccourcir la mise en service, accélérer l'analyse des causes profondes, et réduire la tentation de sur-concevoir « juste au cas où » en révélant où se situe réellement la marge.
La télémétrie a tendance à être la plus importante lorsque les conditions changent rapidement, pas lorsque le rail est stable et facile à mesurer. Les futurs PMICs devraient améliorer le comportement d'échantillonnage, les choix de filtrage, et l'alignement temporel afin que les décisions logicielles suivent la réalité de plus près.
Une nuance que les équipes expérimentées tendent à apprécier est que plus d'échantillons ne sont pas automatiquement plus utiles ; la cohérence, la stabilité de la calibration sur la température, et des définitions claires de la bande passante et de la latence décident souvent si les données peuvent être utilisées en toute confiance.
Avec plus de rails vient un besoin plus fort de comportement de protection coordonné pour que le système réponde de manière cohérente plutôt que rail par rail.
La coordination de protection couvre souvent :
• Comportement de réponse OCP
• Comportement de réponse OVP
• Comportement de réponse UVP
• Comportement de réponse OTP
• Dépendances de séquençage
• Politiques de récupération des défauts
• Partage de statut entre les PMICs
Les systèmes réels échouent fréquemment non pas parce qu'une fonctionnalité est manquante, mais parce que les rails répondent différemment au même événement, produisant des cascades de baisse de tension ou des boucles de redémarrage qui sont frustrantes à diagnostiquer. Une approche coordinée de traitement des défauts, un statut partagé plus un plan de récupération unifié, correspond mieux à la façon dont les plates-formes sont censées se comporter sous stress.
L'adoption de GaN et de SiC augmentera dans les domaines où la fréquence de commutation et l'efficacité changent matériellement la taille ou les performances. Une commutation plus rapide peut réduire la taille des composants magnétiques et affiner la réponse transitoire, mais elle entraîne également des contraintes liées au dv/dt, une sensibilité EMI accrue et des exigences sur la conception des circuits de commande et la stratégie d'isolement. Les contraintes ne sont pas uniquement électriques ; elles impliquent également des limites opérationnelles face à la variation de fabrication et des scénarios d'utilisation abusive réelle que les équipes ont appris à prendre au sérieux.
Les solutions GaN et SiC tendent à récompenser un contrôle précis de la commande du circuit, une disposition disciplinée et des schémas de protection qui préviennent les dépassements, les oscillations et les allumages non souhaités. Une idée pratique qui revient souvent est que la qualité de la disposition peut dominer le choix du dispositif ; une disposition bien exécutée avec un dispositif « modeste » peut surpasser un dispositif haut de gamme placé dans une boucle inductive bruyante.
À mesure que les vitesses de commutation augmentent, les choix d'isolement et les limites de fiabilité à long terme deviennent plus proéminents lors des examens de conception et de la planification de qualification. L'adoption s'accélère généralement lorsque les gains de performance justifient clairement un ajout de rigueur dans la conception, tandis que les produits sensibles aux coûts ou au bruit avancent souvent avec plus de prudence et exigent des preuves plus claires de bénéfice au niveau du système.
Les PMICs sont de plus en plus conçus pour se comporter comme des exécutants de politiques qui arbitrent l'efficacité, le bruit, la thermique et la fiabilité en temps réel. Les architectures qui tendent à bien vieillir considèrent l'énergie comme une ressource gérée : la télémétrie des PMICs renseigne la politique logicielle, et la politique logicielle ajuste à son tour les modes de fonctionnement et le comportement de l'alimentation des PMICs. Cela brouille les frontières entre la propriété matérielle et logicielle d'une manière qui peut sembler inconfortable au début, mais qui porte souvent ses fruits en réduisant l'accumulation de marge et en améliorant la résilience sous de véritables charges de travail.
Conclusion
Une protection efficace du circuit dépend de plus que l'ajout d'une seule pièce de protection. Des conceptions fiables nécessitent une coordination appropriée entre la dérivation des surtensions, le confinement des tensions, la limitation des courants, la mise à la terre, la disposition et le timing des pannes. Chaque dispositif de protection a ses propres forces et limites, donc le choix doit correspondre au type de panne attendu, au niveau d'énergie, à la vitesse de réponse et à l'environnement de fonctionnement. Une stratégie de protection bien planifiée améliore la sécurité, réduit le risque de défaillance et soutient la fiabilité à long terme dans les systèmes électroniques du monde réel.
Questions Fréquemment Posées (FAQ)
1. Pourquoi un PMIC est-il considéré comme un coordonnateur de puissance au niveau du système plutôt que comme un simple régulateur de tension ?
Un PMIC fait bien plus que convertir une tension en une autre. Il gère la manière dont plusieurs rails sont générés, séquencés, surveillés, distribués et protégés à travers l'ensemble du système. Dans des conceptions pratiques, le PMIC coordonne les rails du processeur, les alimentations mémoire, les sections RF, les capteurs, et les domaines périphériques tout en gérant également le timing de démarrage, la récupération après panne, les événements thermiques et le signal de bonne puissance. Comme tous ces comportements interagissent durant le démarrage et l'exploitation, le PMIC devient souvent l'un des principaux facteurs influençant la fiabilité et la stabilité du système.
2. Pourquoi les pannes liées aux PMIC apparaissent-elles souvent uniquement sous des charges de travail réelles plutôt que lors de tests simples en laboratoire ?
Les tests de banc avec des charges statiques reproduisent rarement le comportement transitoire rapide généré par des processeurs modernes, des émetteurs RF, du trafic mémoire et des rafales de capteurs. Dans des conditions d'exploitation réalistes, les rails subissent des pics de courant soudains qui exposent les faiblesses de la réponse transitoire, des parasitiques de la PCB, du réglage de compensation et de la stabilité du réseau de sortie. Un PMIC peut sembler stable lors de tests contrôlés, mais montrer par la suite un affaissement, un dépassement, des oscillations ou des erreurs de séquençage une fois que de vraies charges de travail créent une demande électrique rapidement changeante.
3. Pourquoi la séquence d'alimentation est-elle considérée comme un contrat au niveau du système plutôt que comme une simple fonctionnalité de démarrage ?
De nombreux systèmes numériques nécessitent des relations temporelles spécifiques entre les rails principaux, les rails de mémoire, les alimentations d'E/S, les signaux de réinitialisation et les domaines toujours actifs. Si les rails montent dans le mauvais ordre ou avec un timing incorrect, les processeurs, les blocs de rétention SRAM et les interfaces à grande vitesse peuvent entrer dans des états de fonctionnement indéfinis. Ces problèmes créent souvent des échecs de démarrage intermittents qui ne se manifestent que lors d'extrêmes de température, de baisses de tension ou de conditions de branchement à chaud de la batterie. Un séquençage approprié devient donc un accord coordonné entre les exigences matérielles, logicielles et de silicium plutôt qu'une fonctionnalité de commodité.
4. Pourquoi la réponse transitoire des PMIC peut-elle discrètement limiter la performance réelle des CPU et des GPU ?
Les processeurs modernes génèrent des variations brusques de courant pendant l'opération de boost, les charges de travail d'IA, les pics de jeu et l'activité radio. Si le PMIC ne peut pas maintenir une tension stable durant ces événements, le firmware peut réduire la durée de boost, abaisser la vitesse d'horloge ou élargir les marges de synchronisation pour prévenir les crashs. Dans de nombreux produits, les limitations de distribution de puissance limitent silencieusement les performances soutenues même si le processeur lui-même semble capable sur le papier. La réponse transitoire stable a souvent plus d'influence sur les performances utilisables du système que les spécifications d'efficacité de pointe à elles seules.
5. Pourquoi le bruit de ripples et de commutation des PMIC crée-t-il des problèmes bien au-delà du sous-système d'alimentation lui-même ?
Les harmoniques de commutation et le bruit large bande peuvent scoupler dans des circuits RF, des références ADC, des PLL, des liens SERDES et des chemins analogiques sensibles à travers l'impédance de masse partagée et les parasitiques de PCB. Même des niveaux de ripple relativement petits peuvent réduire la précision de l'ADC, augmenter le bruit de phase, réduire la marge de synchronisation ou dégrader la fiabilité des communications à haute vitesse. Une alimentation qui semble électriquement acceptable isolément peut créer de sérieux problèmes d'intégrité du signal une fois intégrée dans des systèmes mixtes denses.
6. Pourquoi les limitations thermiques des PMIC définissent-elles souvent les performances de calcul soutenues maximales ?
À mesure que la température du PMIC augmente, l'efficacité diminue et les mécanismes de protection thermique peuvent commencer à réduire le courant disponible ou à déclencher un comportement de repli. Dans les systèmes compacts, des points chauds localisés près des processeurs, de la mémoire ou des sections RF peuvent forcer le PMIC à se dégrader thermiquement bien avant que les limites électriques théoriques ne soient atteintes. À cause de cela, les performances soutenues du système dépendent souvent autant de la disposition thermique, de la répartition du cuivre et du choix de l'emballage que des spécifications du régulateur lui-même.
7. Pourquoi les ingénieurs combinent-ils souvent des convertisseurs buck avec des régulateurs LDO dans des conceptions sensibles ?
Les convertisseurs buck fournissent une réduction de tension efficace pour des rails à courant élevé mais introduisent des ripples de commutation et des EMI. Les LDO génèrent une tension de sortie beaucoup plus propre avec moins de bruit mais dissipent plus de chaleur lorsqu'ils abaissent de plus grandes tensions. Un compromis courant utilise un convertisseur buck pour générer un rail intermédiaire de manière efficace, suivi par un LDO pour nettoyer l'alimentation analogique ou RF finale sensible. Cette combinaison équilibre l'efficacité, la gestion thermique et la réduction du bruit plus efficacement que de s'appuyer sur une seule topologie.
8. Pourquoi les politiques de réponse aux défauts des PMIC sont-elles considérées comme faisant partie de l'expérience produit globale ?
Le comportement en cas de défaut détermine si le produit s'arrête proprement, entre dans une boucle de redémarrage, réduit la vitesse de manière gracieuse, ou devient instable lors de conditions anormales. La protection contre les surcourants, l'arrêt thermique, la gestion de la sous-tension et le timing de récupération influencent directement la façon dont l'expérience gère les défauts de batterie, les problèmes de câble ou les événements de surcharge. Des politiques de PMIC bien conçues isolent les défauts de manière prévisible et récupèrent de manières contrôlées, réduisant la complexité de service et empêchant les petits problèmes de dégénérer en défaillances systémiques.
9. Pourquoi les PMIC modernes s'appuient de plus en plus sur la télémétrie et des politiques d'alimentation programmables ?
Les systèmes modernes changent dynamiquement la charge de travail, l'état thermique, l'activité radio et le comportement de charge en temps réel. La télémétrie PMIC permet au firmware de surveiller en continu les conditions des rails, la consommation de courant, la température et les événements de défaut. Ces données permettent un ajustement de tension adaptatif, une gestion thermique, un throttling intelligent et des décisions de protection coordonnées. Cependant, les systèmes d'alimentation programmables introduisent également une nouvelle complexité de validation car une configuration incorrecte du firmware peut créer des pannes qui n'existent pas dans des conceptions analogiques fixes.
10. Pourquoi les conceptions futures de PMIC tendent-elles vers l'« orchestration de l'alimentation » plutôt que vers une simple conversion d'alimentation ?
Les PMIC futurs sont de plus en plus attendus pour coordonner simultanément l'efficacité, la thermique, le comportement EMI, la protection, l'échelonnement de la charge de travail, les politiques de charge, et la télémétrie du système. Les technologies de commutation plus rapides, les marges de tension plus serrées, et les charges de travail hautement dynamiques exigent que le PMIC adapte continuellement son comportement en fonction des conditions réelles plutôt que sur des hypothèses statiques. Cette évolution transforme le PMIC en un sous-système de gestion active qui travaille en étroite collaboration avec le firmware et le logiciel système pour maintenir une opération de plateforme stable, efficace et prévisible sous des conditions changeantes.
Blog connexe
-
Combien de zéros dans un million, des milliards de milliards de billions?
![Combien de zéros dans un million, des milliards de milliards de billions?]()
2024/07/29
Des millions représentent 106, un chiffre facilement saisissable par rapport aux articles quotidiens ou aux salaires annuels. Milliards, équivalent ... -
Fiche technique MOSFET IRLZ44N, circuit, équivalent, épingle
![Fiche technique MOSFET IRLZ44N, circuit, équivalent, épingle]()
2024/08/28
L'IRLZ44N est un MOSFET de puissance à nailaux N largement utilisé.Renommé pour ses excellentes capacités de commutation, il est très adapté à ... -
Température de la batterie trop basse, la charge s'est arrêtée.Comment le réparer?
![Température de la batterie trop basse, la charge s'est arrêtée.Comment le réparer?]()
2024/10/6
Les problèmes de charge de batterie de téléphone portable sont courants mais peuvent être gérés efficacement.La température joue un rôle impor... -
BC547 Guide complet du transistor
![BC547 Guide complet du transistor]()
2024/07/4
Le transistor BC547 est couramment utilisé dans une variété d'applications électroniques, allant des amplificateurs de signal de base aux circuits... -
Guide complet du SCR (redresseur contrôlé en silicium)
![Guide complet du SCR (redresseur contrôlé en silicium)]()
2024/04/22
Les redresseurs contrôlés en silicium (SCR), ou thyristors, jouent un rôle central dans la technologie de l'électronique de puissance en raison de... -
LR621, SR621SW, 364, équivalents de batterie AG1 et remplacements
![LR621, SR621SW, 364, équivalents de batterie AG1 et remplacements]()
2024/07/15
Les batteries de bouton LR621 et SR621SW sont répandues dans des appareils électroniques compacts comme les montres, les petits jouets, les calculat... -
Fondamentaux des circuits d'amplificat
![Fondamentaux des circuits d'amplificat]()
2023/12/28
Dans le monde complexe de l'électronique, un voyage dans ses mystères nous conduit invariablement à un kaléidoscope de composants de circuit, à l... -
Un guide complet des multiplexeurs et leur rôle dans les systèmes numériques
![Un guide complet des multiplexeurs et leur rôle dans les systèmes numériques]()
2025/09/20
Les multiplexeurs sont des composants des systèmes numériques, conçus pour canaliser plusieurs signaux d'entrée dans une seule ligne de sortie en ... -
Comparaison des différences et applications des NMOS et PMO
![Comparaison des différences et applications des NMOS et PMO]()
2024/11/15
Comprendre les différences entre les transistors NMOS et PMOS est important pour concevoir des circuits efficaces.Les NMOS (N-Type Metal-Oxide-Semico... -
CR2450 vs CR2032 Comparaison: tout ce que vous devez savoir
![CR2450 vs CR2032 Comparaison: tout ce que vous devez savoir]()
2025/09/15
Les batteries de bouton comme CR2450 et CR2032 alimentent de nombreux appareils électroniques de tous les jours, des montres et télécommandes aux d...










Pièces chaudes
- SY89829UHY
- MTMC8E280L
- GRM0335C1H3R9BA01J
- TIP36C
- S29GL128P11TFIV20
- AD8642ARZ-REEL7
- F950J107MQAAQ2
- C0603JB1E223K030BB
- LT8301IS5#TRPBF
- TLE5230GS
- UPD179324GB-522-8ET
- LB1848M-TE-R
- C3216X8R2A683M115AA
- ACPM-7313-TR1
- MT29F256G08CBCBBJ4-37:B
- MN101CP52ABL
- LT1257IS8
- DS1340U-3+T
- CY2309SI-1T
- GCM1885G1H390JA16D
- GRM1555C1E5R5DA01D
- CC0402ZRY5V7BB334
- IS24C32C-2ZLI-TR
- AD5541AARMZ
- IS43R16320D-6TLI
- LM2574MX-3.3
- IDT74LVCH16601APF
- GRM033R61C222KA88D
- MIC68400YML
- CGA1A2X7R1C102K030BA
- LC15007-TBM-EV
- 2FI300S-140
- TMP86FS23UG-7AB1
- IP-B50-CW-TR1
- PM8379-BI
- V24C48C100BL2
- MAX7414EUA+T
- T491D106K035AT70277280
- MB95F418KPMC-G-SNE2
- VI-J72-EY
- VE-J3Z-MZ
- MAX3869EMAC+
- TPS650832ZCGT
- MAX3816ACUE
- PSB21525H
- S29GL032A90FFIR23
- LA4585M-TLM
- 51296-5494
- 104X125DA089
- TJA1101BHN/0Z