- Français
-
EnglishDeutschItaliaFrançais한국의русскийSvenskaNederlandespañolPortuguêspolski繁体中文SuomiGaeilgeSlovenskáSlovenijaČeštinaMelayuMagyarországHrvatskaDanskromânescIndonesiaΕλλάδαБългарски езикGalegolietuviųMaoriRepublika e ShqipërisëالعربيةአማርኛAzərbaycanEesti VabariikEuskeraБеларусьLëtzebuergeschAyitiAfrikaansBosnaíslenskaCambodiaမြန်မာМонголулсМакедонскиmalaɡasʲພາສາລາວKurdîსაქართველოIsiXhosaفارسیisiZuluPilipinoසිංහලTürk diliTiếng ViệtहिंदीТоҷикӣاردوภาษาไทยO'zbekKongeriketবাংলা ভাষারChicheŵaSamoa日本語SesothoCрпскиKiswahiliУкраїнаनेपालीעִבְרִיתپښتوКыргыз тилиҚазақшаCatalàCorsaLatviešuHausaગુજરાતીಕನ್ನಡkannaḍaमराठी
Capteurs tactiles en robotique : fonctions, types, évolution et applications
Catalogue

Rôles fondamentaux repositionnés des capteurs tactiles
Les capteurs tactiles sont généralement compris à travers deux rôles étroitement liés : la détection et la reconnaissance. La détection aborde la première couche d'informations liées au toucher, tandis que la reconnaissance étend cette information en une interprétation structurée. Ensemble, ils définissent la manière dont un système perçoit le contact, interprète l'interaction physique et soutient les décisions de contrôle ultérieures.
Détection : La première couche de perception tactile
La détection concerne l'acquisition directe de signaux liés au contact. À ce stade, le système détermine si un contact a eu lieu et recueille des informations physiques mesurables issues de cette interaction.
Le contenu typique de la détection inclut :
• occurrence de contact
• magnitude de la force appliquée
• position de contact
• comportement de mouvement ou de glissement
• caractéristiques de surface telles que la raideur, la texture et la rugosité
À première vue, cela peut sembler être une tâche de détection simple. Dans les environnements d'ingénierie réels, cependant, la détection est rarement aussi claire. Un capteur peut réagir rapidement tout en générant des sorties instables, et ce type d'incohérence crée souvent plus de frustration qu'une réduction modeste de la sensibilité. Ce qui inspire généralement confiance dans la pratique, ce n'est pas une réactivité exagérée, mais un comportement répétable dans des conditions de contact réelles.
La détection forme la première connexion entre l'interaction physique et l'interprétation machine. Lorsque un système robotique touche un objet, la première étape consiste à convertir le contact mécanique en signaux électriques qui peuvent être mesurés et traités.
Ce processus inclut souvent :
• détection de magnitude de force
• cartographie de distribution de pression
• localisation de contact
• suivi d'événements dynamiques
Si un glissement commence, le capteur est censé enregistrer des changements subtils liés à la friction avant que l'objet n'échappe réellement au contrôle. Si la surface contactée est irrégulière, le processus de détection doit séparer les proéminences isolées de la texture continue et distinguer les deux d'une structure plus large liée à la dureté. Dans le déploiement réel, les systèmes performants ne sont pas simplement ceux qui collectent plus de variables ; ce sont ceux qui capturent les variables les plus pertinentes avec un niveau de précision qui sert réellement la tâche.
À l'étape de détection, les capteurs tactiles capturent généralement plusieurs types d'informations physiques :
Ceux-ci comprennent couramment :
• existence de contact
• force de contact
• localisation de contact
• mouvement et glissement
• propriétés de surface telles que la raideur, la conformité et la rugosité
L'existence du contact est le signal le plus basique, mais elle porte une valeur pratique substantielle dans l'initiation de la prise et les réponses liées à la sécurité. La force de contact indique si l'interaction reste douce, contrôlée ou excessive. La localisation du contact révèle comment la charge est répartie sur la région de détection. Le mouvement et le glissement exposent si l'objet reste sécurisé ou commence à se déplacer par rapport à la surface du capteur. Les propriétés de surface ajoutent une autre couche de jugement, offrant des indices sur l'état du matériau et sur la manière dont l'objet doit être manipulé avec précaution.
Dans les environnements appliqués, les signaux de détection bruts apparaissent rarement sous une forme soignée ou complète. De légères vibrations, des charges inégales, des dérives de température et des angles de contact changeants déforment fréquemment la sortie.
Les sources courantes de perturbation du signal incluent :
• de petites vibrations mécaniques
• des charges inégales
• des dérives de température
• des angles de contact changeants
Lors de manipulations répétées, même deux contacts appliqués avec presque la même force peuvent encore produire des courbes de réponse légèrement différentes. C'est une observation familière et parfois déconcertante dans le travail tactile, surtout lorsque les attentes en laboratoire rencontrent la variabilité physique. Pour cette raison, une détection fiable dépend non seulement de la sensibilité du matériel, mais également de la stratégie d'étalonnage et de l'interprétation sensible au temps. Dans de nombreux cas, une détection stable dans des conditions imparfaites apporte plus de valeur pratique qu'une sensibilité idéale démontrée uniquement dans des expériences contrôlées.
Reconnaissance : Interprétation Tactile de Haut Niveau
La reconnaissance s'appuie sur la détection en transformant les signaux tactiles bruts en connaissances significatives sur l'objet contacté. À ce stade, le système va au-delà de la question de ce qui s'est passé au point de contact et commence à se demander quel type d'objet est touché, quelles caractéristiques physiques il exhibe et quelle réponse devrait suivre.
La reconnaissance peut impliquer :
• identification de la forme
• estimation de la taille
• évaluation de la dureté
• interprétation du modèle de contact
• analyse de la structure des bords
• évaluation de l'état de préhension
Cette transition de la mesure physique à l'interprétation structurée permet au sens tactile de soutenir une manipulation intelligente plutôt que de simplement rapporter des événements de contact. C'est aussi le stade où le jugement d'ingénierie devient plus visible, car l'interprétation doit rester ancrée dans des signaux souvent incomplets, bruyants et dépendants du contexte.
La reconnaissance nécessite que le système organise les informations perçues en motifs associés à des caractéristiques d'objet connues. Une large zone de contact combinée à une faible pression locale peut indiquer un objet doux ou compliant. Un motif de force concentrée accompagné de micro-glissement peut pointer vers une surface rigide sous une prise insuffisante. Les distributions spatiales répétées peuvent révéler davantage des bords, des coins ou une géométrie courbe.
Les indices de reconnaissance possibles incluent :
• large zone de contact avec faible pression
• force concentrée avec micro-glissement
• motifs de pression spatiale répétés
En ce sens, la reconnaissance tactile dépasse la simple classification. Elle reflète une lecture contextuelle de l'interaction au fil du temps. Les systèmes les plus fiables tendent à interpréter le toucher comme un événement en développement plutôt que comme une seule mesure figée, ce qui est souvent une manière plus honnête de traiter comment le contact physique se déroule réellement.
La qualité de la reconnaissance est fortement influencée par la qualité de la détection antérieure. Si la localisation du contact est inexacte, l'inférence de la forme devient instable. Si les mesures de force dérivent, l'estimation de la dureté peut devenir trompeuse.
Les limitations courantes en amont incluent :
• localisation du contact inexacte
• dérive des mesures de force
• données de distribution de pression instables
• réponse temporelle incohérente
En raison de cette dépendance, la reconnaissance est mieux comprise comme le résultat d'un pipeline de détection en couches plutôt que comme une étape finale isolée. Dans la pratique de développement, il n'est pas rare de voir la performance de classification avoir l'air impressionnante lors d'une évaluation en laboratoire puis de s'effriter lors de la manipulation réelle, où l'orientation de l'objet, la vitesse de saisie et la contamination de la surface modifient le signal lui-même. Cet écart peut être décevant, mais il offre également un rappel technique sobre : la performance dépend non seulement de la sophistication algorithmique, mais aussi de l'authenticité avec laquelle les données reflètent les conditions réelles de contact.
Pipeline de Traitement dans les Systèmes Tactiles Pratiques
Dans les systèmes tactiles pratiques, la détection et la reconnaissance sont liées par une chaîne de traitement du signal structurée. Le capteur produit d'abord des sorties analogiques qui reflètent l'interaction mécanique. Ces sorties sont ensuite conditionnées pour améliorer la qualité du signal et réduire la distorsion. Après conversion analogique-numérique, le filtrage supprime le bruit tout en préservant les motifs utiles. L'extraction de caractéristiques identifie les composants informatifs, et les algorithmes de classification ou d'inférence mappent ces composants aux attributs d'objet ou aux états de contact.
Une séquence de traitement typique comprend :
• génération de signal analogique
• conditionnement du signal
• conversion analogique-numérique
• filtrage
• extraction de caractéristiques
• classification ou inférence
Cette séquence peut sembler ordonnée sur le papier, mais chaque étape influence ce que la prochaine étape est autorisée à « voir ». Une fois que l'information utile est affaiblie ou supprimée trop tôt, les algorithmes ultérieurs ont peu de chances de la récupérer.
Le conditionnement du signal est utilisé car les sorties tactiles brutes sont souvent faibles, non linéaires ou vulnérables à l'interférence.
Les opérations de conditionnement courantes incluent :
• amplification
• adaptation d'impédance
• correction de ligne de base
Ces opérations préparent le signal pour une analyse ultérieure. La conversion analogique-numérique détermine ensuite dans quelle mesure l'événement tactile continu est capturé fidèlement sous forme numérique. Si l'échantillonnage est trop lent, les variations liées au glissement peuvent passer inaperçues. Si la quantification est trop grossière, des différences subtiles liées à la texture peuvent disparaître. Un bon design système dépend donc d'un alignement des paramètres de traitement électronique avec le comportement mécanique observé, ce qui nécessite souvent plus de retenue et de réglage que ce que les conceptions de première intention ont tendance à anticiper.
Le filtrage fait plus que retirer le bruit indésirable ; il façonne directement les limites perceptuelles du système. Un filtrage excessif peut effacer des motifs transitoires associés à un glissement précoce ou à un contact texturé. Un filtrage insuffisant peut permettre au bruit de se masquer en tant qu'événement significatif.
Des exemples typiques de caractéristiques incluent :
• décalage du centroïde de pression
• pente force-temps
• variance locale
• signature dans le domaine de la fréquence
La même tension apparaît dans l'extraction de caractéristiques. Des caractéristiques efficaces préservent la pertinence physique tout en réduisant la complexité inutile. Dans les systèmes opérationnels, des caractéristiques interprétables s'avèrent souvent particulièrement utiles, car elles permettent aux ingénieurs de retracer des cas d'échec, de raffiner le comportement de contrôle et d'éviter la situation inconfortable dans laquelle un modèle produit des réponses qui semblent précises mais restent difficiles à expliquer.
Une fois les caractéristiques extraites, les algorithmes de classification attribuent un sens à l'événement de contact.
Ces algorithmes peuvent être utilisés pour :
• distinguer les catégories d'objets
• estimer la classe de matériau
• détecter la prise stable par rapport au glissement
• identifier les motifs de contact récurrents
Néanmoins, la classification ne devrait pas être traitée comme un concours étroit d'exactitude de référence. Un modèle avec une précision mesurée légèrement inférieure peut mieux performer lors du déploiement s'il généralise de manière plus fiable et réagit de manière plus prévisible sous dérive du capteur ou variation environnementale. D'un point de vue systémique, une intelligence tactile fiable est souvent construite par une gestion disciplinée de l'incertitude plutôt que par un ajustement agressif à des ensembles de données idéalisés.
Relation entre détection et reconnaissance
La détection et la reconnaissance sont souvent décrites comme des fonctions séparées, mais en pratique, elles restent profondément interdépendantes. La détection fournit la structure mesurable du toucher, tandis que la reconnaissance donne à cette structure un sens opérationnel. Si la détection manque de précision, la reconnaissance devient fragile. Si la reconnaissance est absente, la détection reste descriptive sans offrir suffisamment de direction pour l'action. C'est pourquoi les systèmes tactiles efficaces sont généralement conçus avec un matériel de détection, un traitement du signal et une logique décisionnelle en alignement délibéré avec la tâche de manipulation intended.
Lors de la saisie robotique, la détection peut d'abord confirmer le contact et mesurer la distribution de force. La reconnaissance interprète ensuite si l'objet est mou, rigide, glissant, centré ou mal aligné.
Cette interprétation peut guider :
• ajustement de la prise
• planification des mouvements
• réponse de sécurité
Dans ce cadre de retour d'information, la détection tactile sert de partie de la logique de contrôle actif plutôt que comme un canal de mesure passif. Les systèmes les plus performants sont donc souvent axés sur les tâches. Ils n'essayent pas de détecter chaque variable avec la même emphase. Au lieu de cela, ils se concentrent sur l'information qui soutient le plus directement une action stable, informée et techniquement défendable.
Compréhension plus large de leurs principaux rôles
Les rôles principaux des capteurs tactiles vont bien au-delà de la simple détection de contact. À un niveau plus profond, ils soutiennent une compréhension physique structurée à travers des capteurs superposés, un traitement du signal et une interprétation. La détection capture les faits observables du contact. La reconnaissance explique ce que ces faits suggèrent sur l'objet et l'interaction. Entre ces deux couches se trouve le défi d'ingénierie plus large de l'intelligence tactile : retenir des informations physiquement utiles tout en les convertissant en connaissances exploitables. Un système tactile bien conçu se distingue non pas parce qu'il produit plus de données, mais parce qu'il convertit le contact en jugement éclairé avec suffisamment de rapidité, de précision et de fiabilité pour soutenir l'interaction dans le monde réel.
Évolution des capteurs tactiles et expansion technique

Capteurs tactiles dans les années 1970
La recherche sur les capteurs tactiles a progressé lentement durant les années 1970, lorsque les systèmes robotiques étaient principalement conçus pour déterminer si un contact s'était produit et pour estimer l'ampleur de la force appliquée. La plupart des systèmes tactiles de cette période se concentraient sur la réponse à ces deux questions fondamentales. Cette limitation reflétait l'état plus large de la technologie robotique à l'époque. Les architectures de contrôle étaient relativement simples, les ressources informatiques étaient limitées, et l'intégration mécanique posait souvent des défis plus importants que les éléments de capteur eux-mêmes.
En conséquence, les premiers capteurs tactiles présentaient généralement une faible résolution spatiale, une sensibilité limitée, une courte durée de vie, et des performances instables sous des conditions de charge répétées. Bien que ces dispositifs pouvaient soutenir des opérations de contact de base, ils offraient rarement la cohérence requise pour des tâches de manipulation délicates ou pour des opérations dans des environnements incertains. De nombreuses expériences d'ingénierie précoce ont révélé que le défi s'étendait au-delà de la détection de pression. Les ingénieurs devaient également maintenir une qualité de signal fiable malgré des déformations répétées, des fluctuations de température, et l'usure des surfaces. Cette expérience a établi un principe important qui continue d'influencer le développement des capteurs tactiles aujourd'hui : une détection tactile utile nécessite des progrès simultanés dans la qualité du signal, la conformité mécanique, et la robustesse du système. Tout au long de l'histoire du domaine, cet équilibre a souvent distingué les systèmes pratiques réussis des prototypes de laboratoire prometteurs.
Technologies de détection dans les années 1980
Au cours des années 1980, la recherche sur les capteurs tactiles est entrée dans une période de développement beaucoup plus rapide. Les chercheurs ont élargi leur champ d'action au-delà des dispositifs à principe unique et ont commencé à explorer une plus large gamme de technologies de détection, y compris les approches résistives, capacitatives, piézoélectriques, optiques, ultrasonores, thermiques, et magnétiques. Cette diversification s'est produite parce que chaque mécanisme de détection offrait des avantages uniques tout en introduisant ses propres limitations. Les ingénieurs devaient souvent équilibrer des exigences concurrentes impliquant sensibilité, bande passante, flexibilité structurelle, immunité au bruit, complexité de fabrication, et coût.
Les capteurs tactiles résistifs étaient généralement simples à fabriquer et à intégrer dans des systèmes plus larges, mais un dérive à long terme pouvait réduire la fiabilité des mesures. Les capteurs capacitifs offraient une haute sensibilité et une faible consommation d'énergie, bien qu'ils nécessitaient un blindage soigneux et des circuits électroniques de support stables. Les capteurs piézoélectriques répondaient efficacement aux forces changeantes mais étaient moins adaptés mesure des charges statiques. Les capteurs tactiles optiques fournissaient une haute résolution et une forte résistance à l'interférence électromagnétique, mais nécessitaient souvent des structures d'emballage plus compliquées. Au fur et à mesure que la recherche progressait, il devenait de plus en plus clair qu'aucun principe de détection unique ne pouvait satisfaire chaque application. Les stratégies de conception pratiques se sont donc déplacées vers la sélection de technologies de détection en fonction des exigences de la tâche plutôt que de poursuivre une solution universelle.
Traitement des données tactiles et exploration active
Les années 1980 ont également vu des progrès significatifs dans le traitement des données tactiles et l'exploration tactile active. Ce développement représentait un changement important dans la façon dont les chercheurs évaluaient la performance de la détection tactile. L'efficacité d'un système tactile n'était plus déterminée uniquement par les propriétés matérielles ou la conception du transducteur. La performance dépendait de plus en plus de la manière dont les informations tactiles étaient traitées et interprétées lors de l'interaction avec l'environnement.
L'automatisation industrielle a joué un rôle majeur dans cette transition. Les robots étaient censés détecter le glissement, estimer les conditions de contact, identifier les caractéristiques de la surface et ajuster la force de préhension en temps réel. Grâce à un déploiement pratique, les chercheurs ont découvert à maintes reprises que les signaux tactiles bruts contenaient peu de signification par eux-mêmes. Des informations précieuses n'émergeaient qu'après calibration, filtrage, extraction de caractéristiques et analyse spécifique à la tâche. Par conséquent, l'histoire de la détection tactile est devenue non seulement une histoire de matériel amélioré mais aussi une histoire de transformation des mesures de contact en informations de contrôle exploitables.
Imagerie tactile et perception intégrée dans les années 1990
Dans les années 1990, la recherche sur les capteurs tactiles était devenue plus large, plus systématique et de plus en plus interdisciplinaire. L'attention s'est déplacée des éléments de détection individuels vers des cadres de détection complets qui incorporaient des architectures de capteurs, de l'imagerie tactile, de la reconnaissance de formes, de la perception active et des systèmes robotiques intégrés. Pendant cette période, la détection tactile a également maturé conceptuellement. Plutôt que d'être considérée comme un composant auxiliaire ajouté vers la fin du développement du système, la détection tactile a commencé à être reconnue comme un canal de perception indépendant avec ses propres caractéristiques spatiales, dynamiques temporelles et importance fonctionnelle.
L'imagerie tactile a permis de représenter les informations de contact distribuées sous une forme similaire aux données visuelles. Cette capacité a ouvert de nouvelles opportunités pour la reconnaissance de motifs et la caractérisation d'objets. La recherche en reconnaissance de formes a encore démontré que les informations tactiles pouvaient révéler des détails que les systèmes visuels peinaient souvent à obtenir. Ces avantages sont devenus particulièrement évidents lorsque les objets étaient occultés, déformables, réfléchissants, submergés ou situés dans des environnements confinés. L'expérience pratique a constamment montré que lorsque les informations visuelles deviennent peu fiables, les informations tactiles deviennent souvent plus précieuses. En conséquence, la détection tactile est progressivement passée d'un rôle de soutien à une position plus centrale dans la manipulation et la perception robotiques.
Applications médicales des capteurs tactiles au début des années 2000
Le début des années 2000 a introduit une autre transition majeure alors que la détection tactile s'est étendue à des applications médicales et sur le terrain. Ce changement reflétait à la fois des améliorations technologiques et une reconnaissance croissante de l'importance des retours d'informations tactiles dans des environnements d'exploitation exigeants.
En 2002, des capteurs tactiles ont été intégrés dans des cathéters utilisés pour la chirurgie endoscopique afin d'estimer la rigidité des tissus et de réduire le risque d'application d'une force excessif. Ce développement était particulièrement significatif car les procédures peu invasives limitent le retour d'information tactile direct et obligent les chirurgiens à s'appuyer fortement sur des informations indirectes. Même la restauration partielle de la sensation tactile a amélioré la sécurité et la précision des procédures.
En 2003, une équipe de recherche japonaise a développé un capteur tactile piézoélectrique tridimensionnel pour un doigt robotique et l'a appliqué à une interface de simulation de foie utilisée dans la formation chirurgicale peu invasive. Ce travail a démontré que la détection tactile pouvait soutenir non seulement la manipulation directe mais aussi la simulation, la formation et le développement des compétences. Des interfaces tactiles bien conçues ont aidé les utilisateurs à distinguer des variations de force subtiles et ont réduit le temps nécessaire pour s'adapter à des procédures complexes.
Détection tactile pour la robotique sous-marine et sur le terrain
En 2009, des chercheurs allemands ont mis en œuvre un système de détection tactile sur un robot sous-marin inspiré de la pieuvre, permettant une détection d'obstacles plus autonome et une exploration du fond marin. Ce projet illustre la valeur stratégique de la détection tactile dans des environnements où la visibilité est limitée, les conditions d'éclairage sont médiocres ou la qualité de l'eau interfère avec les systèmes optiques. Dans de telles situations, le toucher peut devenir l'une des sources d'informations environnementales les plus fiables.
De la détection de contact à la perception intelligente
Considérée dans son ensemble, le développement de la détection tactile démontre une progression claire de la détection de force de base vers des systèmes de perception sophistiqués capables de soutenir un contrôle en boucle fermée dans des environnements complexes. La signification plus profonde de cette évolution réside non seulement dans l'expansion des applications mais aussi dans les attentes changeantes placées sur les technologies de détection tactile.
La détection tactile a évolué d'un détecteur de contact passif à une interface active entre les machines et leur environnement. Les avancées les plus significatives se sont produites lorsque les chercheurs ont reconnu le toucher comme un canal de perception unique plutôt que simplement un substitut à la vision. Les informations tactiles peuvent révéler des propriétés telles que la rigidité, la texture, le glissement, la géométrie locale et l'intention d'interaction. À l'avenir, les progrès dépendront probablement moins d'améliorations isolées de la sensibilité et davantage de l'intégration de matériaux avancés, de conception mécanique, d'interprétation des signaux et de stratégies de contrôle au sein de cadres de détection unifiés. L'histoire du domaine a déjà démontré la valeur de meilleurs capteurs. Tout aussi important, cependant, est la compréhension croissante que l'interprétation améliorée de l'interaction a souvent un impact encore plus important sur la performance du système.
Classification des capteurs tactiles
Les capteurs tactiles peuvent être interprétés sous des perspectives à la fois larges et étroites.
Au sens large, ils impliquent la perception du toucher, de la pression, de la force, du glissement, de la température, de la texture de surface et des vibrations.
Au sens étroit, ils se concentrent sur l'interaction mécanique formée à l'interface de contact entre un système robotique et un objet externe.
D'un point de vue ingénierie, la vue plus étroite est souvent plus directe car elle aligne les cibles de mesure avec la saisie, la manipulation, la régulation de contact et le contrôle de mouvement. Cette distinction peut sembler sous-estimée à première vue, mais elle aide souvent à débarrasser la discussion conceptuelle des encombrements et aide les discussions de conception à rester ancrées dans un comportement mesurable.
Un chemin de classification plus utilisable regarde au-delà de la fonction seule et considère également le principe physique qui convertit les événements de contact en signaux mesurables.
Les groupes fonctionnels courants incluent les capteurs de contact, les capteurs de force-moment, les capteurs de pression et les capteurs de glissement.
Ces groupes restent informatifs, mais leurs limites s'estompent souvent dans le déploiement réel. Une unité de détection peut répondre à la force normale, à la force tangente, et au glissement précoce dans la même interaction. Pour cette raison, la classification par méthode de transduction fournit souvent une structure technique plus claire. Elle clarifie non seulement ce qu'un capteur détecte, mais aussi comment il se comporte sous bruit, charge soutenue, limites d'emballage, pression de calibration et contraintes d'intégration au niveau du système. Dans le travail d'ingénierie réel, ce deuxième niveau de classification résout souvent les débats que les étiquettes purement fonctionnelles laissent non résolus.
Vue fonctionnelle des capteurs tactiles
D'un point de vue fonctionnel, les capteurs tactiles sont généralement regroupés selon la quantité physique ou l'événement qu'ils sont censés capturer.
Capteurs de contact
Les capteurs de contact déterminent si un contact physique s'est produit entre une surface de détection et un objet. Leur sortie peut être binaire ou basée sur un seuil, mais ce retour d'information apparemment modeste fixe souvent le ton pour toute la séquence d'interaction. Dans la saisie robotique, un simple signal de contact peut limiter une force de fermeture excessive, réduire les dommages liés aux collisions et soutenir la logique de contrôle déclenchée par des événements. De nombreux systèmes opérationnels commencent par une détection de contact fiable avant d'avancer vers une estimation de force plus élaborée.
Le déploiement pratique révèle à plusieurs reprises la même leçon : lorsque le premier contact est détecté trop tard, ou lorsque le signal arrive avec trop de bruit, le contrôle en aval devient plus difficile à établir. Les ingénieurs ressentent rapidement ce problème, car même un contrôleur bien réglé perd de son calme lorsque le premier indice physique est vague.
Capteurs de force-moment
Les capteurs de force-moment mesurent les forces et les couples agissant à l'interface de contact. Ils servent dans des situations où un système doit faire plus que confirmer le contact ; il doit également interpréter la direction, l'amplitude et l'effet de rotation. Cette capacité soutient la manipulation adroite, l'assemblage conforme et l'utilisation d'outils.
Leur contribution réside dans l'aide apportée à un robot pour ajuster sa posture, sa prise et son mouvement lorsque les charges se déplacent de manière subtile. En pratique, la précision de la force à elle seule ne raconte rarement toute l'histoire.
Transformation stable des coordonnées, faible couplage inter-axes, montage répétable.
Ces facteurs façonnent souvent la performance globale tout aussi fortement. Les concepteurs expérimentés apprennent généralement cela avec un certain agacement, car des spécifications de capteurs élégantes peuvent perdre une grande partie de leur attrait une fois que l'incohérence de montage commence à distordre les données.
Capteurs de pression
Les capteurs de pression capturent la distribution spatiale de la charge normale sur une zone de contact. Cela les rend bien adaptés aux matrices tactiles, à la peau artificielle, à l'évaluation de la prise et à l'estimation de la forme des objets. La cartographie de la pression fournit plus qu'une magnitude de force nette.
• Elle montre où la charge est concentrée.
• Elle montre comment la charge se déplace au fil du temps.
• Elle montre si le motif de contact présent suggère un maintien stable ou une surcharge locale.
Dans de nombreuses tâches de manipulation, l'information de pression distribuée en dit plus qu'une seule valeur de force résultante, car le contact réel se produit rarement à un point idéalisé. C'est une des raisons pour lesquelles les réseaux de pression denses continuent d'attirer l'attention, même lorsque les exigences en matière de câblage et de traitement du signal mettent à l'épreuve la patience de l'équipe de conception.
Capteurs de Glissement
Les capteurs de glissement détectent le mouvement relatif, ou le début d'un mouvement, entre la surface de contact et un objet. Leur rôle devient particulièrement significatif car une prise réussie dépend non seulement de l'application de la force, mais aussi de la capacité à remarquer lorsque cette force n'est plus suffisante. Une détection précoce du glissement donne au système de contrôle une chance d'augmenter la prise avant que la perte complète de l'objet ne se produise.
Dans des contextes pratiques, les signaux de glissement les plus utiles sont souvent ceux qui exposent le micro-mouvement juste avant l'échec visible. Les signaux qui ne confirment le glissement qu'après qu'il soit évident sont beaucoup moins utiles. Cette courte période de transition a un poids inhabituel dans la manipulation, et de nombreux ingénieurs développent un respect sain pour elle après avoir vu des prises par ailleurs prometteuses échouer en une fraction de seconde.
Classification par Méthode de Transduction
La classification fonctionnelle décrit l'objectif de détection, tandis que la classification basée sur la transduction explique le mécanisme interne qui génère le signal. Pour les décisions de conception, cette approche est souvent plus révélatrice car elle influence directement la sensibilité, la linéarité, la robustesse, le coût, la fabriquabilité et la compatibilité avec le matériel robotique. Elle donne également une image plus franche de ce qu'un capteur exigera après la phase prototype, lorsque l'optimisme rencontre généralement la discipline de l'intégration.
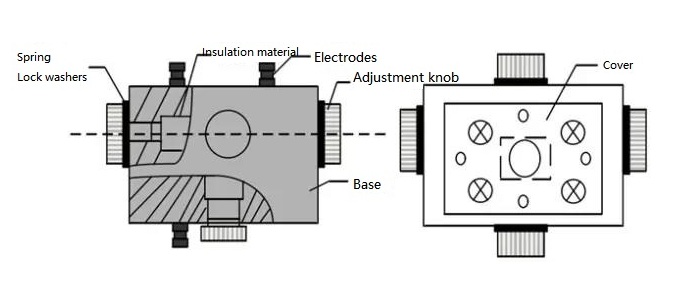
Capteurs Tactiles Piezorésistifs
Les capteurs piezorésistifs fonctionnent en modifiant la résistance électrique sous une charge mécanique appliquée. Ils sont largement utilisés car le principe est simple, l'électronique est relativement simple et le coût peut rester modeste. Ils s'adaptent également bien à l'intégration en réseau, ce qui les rend attrayants pour les peaux tactiles de grande surface et les surfaces de cartographie de pression.
Leur attrait le plus fort réside dans leur praticité. Ils sont relativement faciles à fabriquer, à interfacer et à mettre à l'échelle dans de nombreuses applications. Cette commodité explique pourquoi ils apparaissent si souvent dans des prototypes et des concepts commerciaux. En même temps, leurs inconvénients ne peuvent pas être négligés.
Dérive de résistance, hystérésis, sensibilité à la température, fatigue des matériaux à long terme.
Ces effets peuvent réduire la fiabilité des mesures. Sous des charges répétées, le signal peut dériver même lorsque la force appliquée ne change pas. Cela va au-delà d'un simple désagrément théorique ; cela crée souvent des charges de calibration et rend le contrôle de force en boucle fermée moins prévisible dans le temps.
L'expérience de mise en œuvre tend à pointer dans la même direction : les capteurs piezorésistifs fonctionnent mieux lorsque la conception reconnaît leurs imperfections tôt.
Sélection des matériaux, stratégie de compensation, routine de recalibration.
Ces choix de conception comptent généralement plus que des caractéristiques statiques idéalisées sur papier. Cette conclusion n'est pas glamour, mais c'est souvent là que commence un jugement d'ingénierie durable.
Capteurs Tactiles Optiques
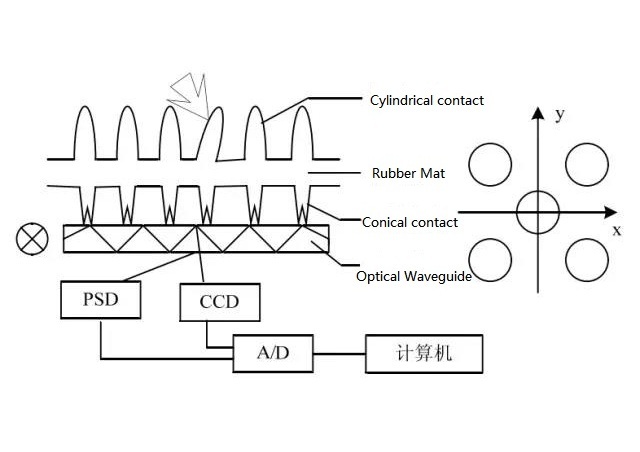
Les capteurs tactiles optiques détectent la déformation en mesurant les changements d'intensité lumineuse, de chemin lumineux, de réflexion, de réfraction ou de caractéristiques d'image au sein de la structure de détection. Parce que le principe de détection est séparé de la lecture directe de la déformation électrique, ces capteurs peuvent offrir une forte immunité aux interférences électromagnétiques et peuvent fournir des informations spatiales riches.
Leur avantage le plus frappant est la densité d'information. Les méthodes optiques peuvent capturer une géométrie de contact détaillée, des champs de déformation et, dans certaines conceptions, des motifs liés au cisaillement. Cela les rend hautement précieux pour la reconnaissance d'objets, la caractérisation de surfaces et la manipulation fine. Dans des systèmes avancés, la détection tactile optique peut fonctionner presque comme de l'imagerie de couche de contact, offrant aux ingénieurs un niveau de détail qui est difficile à ignorer une fois qu'ils ont vu fonctionner.
Le compromis réside dans la complexité structurelle.
Emballage soigné, illumination contrôlée, alignement précis, traitement d'image ou de signal non trivial.
Ces exigences ne sont pas incidentelles. Les performances peuvent diminuer lorsque le chemin optique interne se déplace, lorsque l'élastomère vieillit ou lorsque des contaminants modifient le comportement réfléchi. Dans une utilisation réelle, un concept qui semble élégant dans le laboratoire peut devenir obstinément difficile en tant que produit, en grande partie parce que la robustesse mécanique et la cohérence optique sont plus difficiles à préserver que prévu. Pour cette raison, la détection tactile optique tend à être la plus convaincante lorsque la perception riche compense vraiment le fardeau supplémentaire du système.
Capteurs Tactiles Capacitatifs
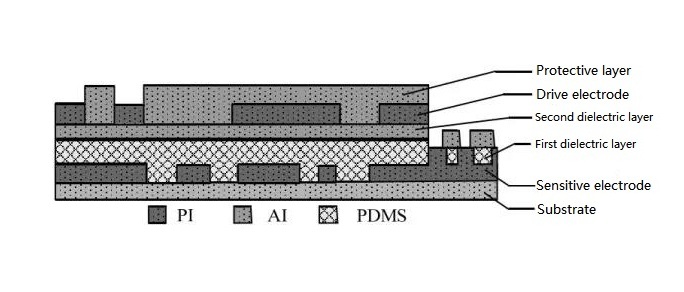
Les capteurs tactiles capacitifs mesurent la force ou la pression à travers des variations de la capacité causées par le déplacement des électrodes, la variation de la surface de contact ou la déformation diélectrique. Ils sont connus pour leur haute sensibilité, leur faible consommation d'énergie et leur forte réactivité. Pour une mesure tactile raffinée, ils sont souvent perçus avec un optimisme considérable.
Un avantage majeur de la détection capacitive est que de petits changements structurels peuvent produire des réponses électriques mesurables. Cela soutient la détection d'un touché léger et de variations de pression subtiles, ce qui est très utile pour l'interaction conforme et la prise délicate. Les structures capacitives peuvent également être fabriquées minces et flexibles, les rendant bien adaptées aux surfaces de détection distribuées.
En même temps, ces capteurs sont vulnérables à plusieurs perturbations.
Capacité parasite, bruit environnemental, effets de l'humidité, interférences électromagnétiques.
De tels facteurs peuvent introduire de l'instabilité ou de fausses variations, en particulier dans des matrices denses et des assemblages robotiques compacts où les lignes de signal sont étroitement regroupées. En pratique, la performance utilisable est souvent décidée par la discipline de mise en œuvre plutôt que par la théorie seule.
Blindage, mise à la terre, conception de circuit, architecture de lecture.
Ces aspects déterminent souvent si la sensibilité attendue devient des données fiables. De nombreuses équipes découvrent que la détection capacitive semble trompeusement simple au niveau des principes, puis devient beaucoup plus exigeante lors de l'intégration.
Capteurs tactiles conductifs magnétiques
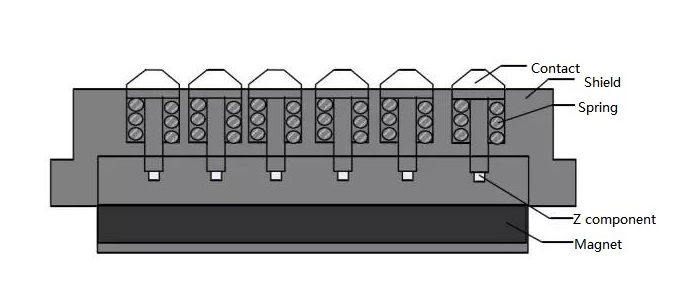
Les capteurs tactiles conductifs magnétiques convertissent les changements induits par la force dans la distribution du champ magnétique en sortie électrique. Leurs structures combinent souvent un milieu déformable, des éléments magnétiques et des composants sensibles au champ tels que des dispositifs Hall ou des éléments magnétorésistifs. Cette méthode peut soutenir des conceptions compactes, une sensibilité pratique et, dans certains cas, une bonne tolérance à l'usure mécanique à l'interface électrique.
Une caractéristique attrayante est que la déformation mécanique ne nécessite pas toujours de contact électrique direct au point de mesure. Cela peut améliorer la durabilité et élargir les options de conception structurelle. Les méthodes magnétiques peuvent également soutenir la détection multidirectionnelle lorsque le champ magnétique est intentionnellement modelé et mesuré sur plusieurs axes.
Néanmoins, ces capteurs sont moins courants dans les plateformes robotiques grand public. Les raisons vont au-delà de la seule performance de détection.
Perturbation magnétique externe, contraintes d'emballage, difficulté de calibration, historique limité de normalisation industrielle.
Tous ces facteurs influencent leur diffusion. Pourtant, cette classe reçoit souvent moins d'attention qu'elle ne le mérite. Lorsque des indices de force tridimensionnels compacts sont nécessaires et que les conditions environnementales restent gérables, la détection magnétique peut offrir une solution équilibrée entre simplicité structurelle et informations plus riches. C'est le genre d'option qui peut ne pas dominer les discussions au début, mais qui peut devenir étonnamment convaincante dans la bonne application.
Capteurs tactiles piézoélectriques
Les capteurs tactiles piézoélectriques génèrent une charge électrique lorsqu'ils sont soumis à un stress mécanique. Ils sont particulièrement efficaces pour la détection de force dynamique car ils réagissent rapidement et peuvent produire des sorties à fort rapport signal-bruit lors d'événements transitoires. Cela les rend bien adaptés à la détection des impacts, à la détection des vibrations, aux événements liés à la texture et à la surveillance des changements de contact rapides.
Leur limitation est également bien connue : ils ne sont généralement pas bien adaptés à la mesure de force statique car la charge générée tend à décroître avec le temps. En conséquence, ils excellent dans la détection du changement, mais ils ne maintiennent pas une valeur constante avec grâce sous une charge constante. Cette caractéristique ne diminue pas la technologie par défaut ; elle définit simplement où la méthode fonctionne avec confiance et où elle ne le fait pas.
Certains des conceptions les plus solides émergent lorsque cette nature dynamique est considérée comme une caractéristique délibérée. Dans les systèmes de manipulation, les éléments piézoélectriques sont souvent les plus efficaces lorsqu'ils sont associés à d'autres modalités de détection. Ils peuvent capturer des événements rapides que des capteurs plus lents ou sujets à la dérive pourraient manquer. En ce sens, ils s'intègrent naturellement dans des architectures tactiles hybrides, où les informations statiques et dynamiques sont séparées au lieu d'être forcées dans un seul canal compromis.
Directions d'ingénierie prédominantes dans le développement de capteurs tactiles
Les travaux historiques et contemporains à travers ces catégories de capteurs mettent en évidence plusieurs directions récurrentes.
Détection multidirectionnelle
La détection tactile moderne évolue au-delà de la simple détection de force normale vers la mesure simultanée de la force normale, de la force de cisaillement, du couple et du mouvement lié au glissement.
Force normale, force de cisaillement, couple, mouvement lié au glissement.
Ce changement reflète une compréhension plus profonde de la manipulation. Un contact réel est intrinsèquement multidimensionnel. Un capteur qui mesure uniquement un composant peut encore être utile, mais il ne peut pas décrire pleinement comment un objet est tenu, poussé, tordu ou relâché. À mesure que les tâches de manipulation deviennent plus habiles, la détection multidirectionnelle semble moins être un raffinement optionnel et davantage une réponse naturelle à la réalité physique.
Densité de Matrice Supérieure
Une autre direction visible est le développement de matrices tactiles plus denses. Une densité plus élevée améliore la résolution spatiale et permet à une surface de détection de capturer des détails plus fins de la distribution du contact, de l'emplacement des bords, de la déformation locale et des indices de texture.
Distribution de contact, emplacement des bords, déformation locale, indices de texture.
Cependant, une densité plus élevée augmente également la complexité du câblage, les exigences de lecture, le risque de diaphonie et la charge de traitement des données. Cela crée un compromis d'ingénierie familier : plus de données ne deviennent pas automatiquement plus d'informations utiles à moins que l'électronique en aval et les algorithmes ne soient préparés à les absorber efficacement. Quiconque a travaillé sur l'intégration de matrices denses développe généralement des sentiments partagés ici, car l'attrait des données plus riches arrive souvent avec une forte augmentation de la charge du système.
Intégration Système Plus Serrée
Les capteurs tactiles sont de plus en plus conçus comme des composants de systèmes robotiques complets plutôt que comme des composants isolés.
Conformité mécanique, conditionnement du signal, traitement embarqué, politique de contrôle, montage structurel.
Ces éléments sont désormais plus étroitement liés. Cela reflète un changement plus large dans le jugement d'ingénierie. Un capteur tactile gagne de la valeur non seulement par sa sensibilité brute, mais par sa capacité à améliorer le comportement au niveau du système. De nombreux designs échouent non pas parce que le principe de détection est faible, mais parce que le capteur, le contrôleur et la structure mécanique ont été développés comme s'ils appartenaient à des mondes séparés. Cette déconnexion est facile à sous-estimer pendant le développement conceptuel et difficile à pardonner une fois que le système atteint son plein fonctionnement.
Une Vue Réaliste de la Sélection de Capteurs
Aucune méthode de détection tactile unique n'est universellement supérieure. Chaque technologie représente un équilibre différent entre sensibilité, robustesse, réponse temporelle, manufacturabilité, résolution spatiale et charge d'intégration. Le choix le plus approprié dépend de la tâche cible, de l'environnement de fonctionnement et de l'architecture de contrôle environnante.
• Pour une détection distribuée à faible coût sur de grandes surfaces, les approches piézorésistives restent très attractives.
• Pour l'imagerie de contact haute résolution, les méthodes optiques offrent souvent un plus grand pouvoir d'expression.
• Pour la mesure tactile statique légère et sensible, les capteurs capacitifs restent convaincants lorsque les interférences sont maîtrisées.
• Pour la détection d'événements dynamiques, la détection piézoélectrique conserve un avantage clair.
• Pour une détection multidirectionnelle compacte dans des conditions bien gérées, les approches magnétiques offrent des options prometteuses.
Un principe de sélection pratique est de choisir la méthode de détection en fonction du mode de défaillance le plus important. Si la préoccupation principale est de manquer de petits contacts statiques, une classe de capteurs se démarquera. Si la préoccupation principale est de ne pas détecter un glissement rapide ou un impact, une autre classe aura plus de sens. Cette perspective conduit souvent à de meilleurs résultats de conception que de sélectionner un capteur uniquement par sensibilité maximale ou par sa popularité dans la recherche publiée. Elle demande une conversation plus honnête avec l'application, et cette honnêteté porte généralement ses fruits.
La classification des capteurs tactiles n'est pas simplement un exercice de nommage de catégories. Elle exprime la relation entre le contact physique, la génération de signaux et la fonction robotique. La classification fonctionnelle explique quel type d'information de contact est recherché. La classification basée sur la transduction explique comment cette information est physiquement obtenue et quels compromis techniques l'accompagnent.
La direction plus large du domaine suggère que les futurs systèmes tactiles s'appuieront moins sur la performance isolée des capteurs et davantage sur des stratégies de détection intégrées.
Plusieurs mécanismes, perception spatiale dense, compatibilité directe avec les systèmes de contrôle.
Dans ce contexte, le capteur tactile le plus efficace n'est souvent pas celui avec la spécification autonome la plus impressionnante, mais celui qui préserve une intelligence de contact fiable dans des conditions d'exploitation réelles. Cette conclusion peut sembler retenue, mais elle continue de séparer des concepts polies des systèmes que les ingénieurs peuvent faire confiance lorsque le travail cesse d'être théorique.
Applications des Capteurs Tactiles
Les capteurs tactiles ont bien évolué au-delà de la simple détection de pression et soutiennent maintenant une plus large gamme de fonctions avancées dans les prothèses, l'automatisation industrielle et l'électronique portable. Leur contribution ne se limite pas à identifier le contact. Ils convertissent l'interaction physique en informations qui peuvent être interprétées avec cohérence, sur lesquelles on peut agir avec confiance, et qui s'alignent sur les exigences des conditions d'exploitation réelles. Dans les systèmes appliqués, leur valeur pratique émerge lorsque les signaux bruts sont traduits en jugements exploitables.
• Quelle fermeté d'adhérence
• Quand arrêter le mouvement
• Comment distinguer un contact sûr d'une force nocive
• Comment renvoyer un retour d'information significatif à l'utilisateur
En conséquence, le domaine n'est plus seulement façonné par la sensibilité. Il est désormais de plus en plus dirigé par l'interprétation des signaux, la compatibilité mécanique et l'intégration au niveau système.
Capteurs Tactiles dans les Systèmes Prothétiques
Dans la technologie prothétique, il est demandé aux capteurs tactiles de faire beaucoup plus que simplement enregistrer une force externe. L'objectif plus profond est de recréer une forme de toucher que le corps humain peut interpréter avec moins de contrainte et une plus grande clarté intuitive. La peau naturelle ne décrit pas le contact par une valeur ininterrompue. Elle dépend de mécanorécepteurs spécialisés qui transforment la pression, la vibration et la texture en activité neurale pulsée. Le timing et la fréquence de ces pulsations portent une information en couches.
• Forme de l'objet
• Douceur
• Glissement
• Magnitude de la force
Ce principe biologique a influencé de manière continue l'architecture des systèmes de détection prothétiques avancés.
Les capteurs tactiles artificiels traditionnels produisent souvent des variations de tension analogique ou de résistance. Bien que de tels résultats restent utiles pour la mesure, ils ne s'alignent pas naturellement avec le style de signalisation basé sur des événements du système nerveux. Un calcul supplémentaire est donc nécessaire pour convertir des sorties continues en motifs semblables à des pics adaptés à la stimulation neurale ou au contrôle biomimétique. Cette étape de traduction décide souvent si le retour d'information est perçu comme accessible ou mentalement fatigant pour le porteur. Un système peut fonctionner avec une précision impressionnante en laboratoire mais sembler encore maladroit dans une utilisation quotidienne si son retour d'information arrive en retard, fluctue de manière inattendue ou réduit la sensation à des indices trop simplifiés.
Codage Neuromorphique et Naturalité Sensorielle
Le codage neuromorphique est apparu comme une direction prédominante car il tente de réduire la distance entre la détection artificielle et la communication biologique. Plutôt que de se concentrer uniquement sur l'amplitude du signal, les stratégies neuromorphiques soulignent la structure temporelle, la génération d'événements rares et l'encodage adaptatif. Cette approche peut réduire la charge de données, raccourcir le temps de réponse et produire des motifs de rétroaction qui semblent plus proches du toucher naturel. Une leçon de conception pratique est devenue de plus en plus claire : la naturalité dépend souvent moins de la maximisation de la complexité et plus de la préservation de transitions significatives.
• Premier contact
• Charge croissante
• Apparition du glissement
Lors des tâches de manipulation réelles, ces transitions portent souvent plus de valeur opérationnelle que des valeurs de force statiques seules.
L'expérience de l'utilisation de prothèses a montré à plusieurs reprises que les porteurs préfèrent souvent un retour d'information stable et prévisible par rapport à un retour d'information théoriquement plus riche mais plus difficile à interpréter. Quelqu'un essayant de tenir un gobelet en papier, de fermer une chemise ou de soulever un objet fragile tire peu d'un excès de détails si ce détail arrive de manière incohérente. Ce qui s'avère vraiment utile, c'est une information opportune qui réduit le risque d'écrasement, de chute ou d'ajustement répété de l'adhérence. Pour cette raison, de nombreux designs réussis mettent l'accent sur l'encodage à faible latence, les seuils de force calibrés et des indices sensoriels répétables.
Interfaces Flexibles et Intégration Neurale
Les matériaux flexibles et les interfaces douces sont largement utilisés car les systèmes prothétiques doivent interagir avec des surfaces courbes, des articulations mobiles et des tissus biologiques sensibles. Les plateformes de capteurs rigides peuvent offrir de la précision, mais elles apportent souvent de l'inconfort, une concentration de stress localisée et une faible conformité à long terme. Les couches tactiles flexibles, les élastomères conducteurs et les interconnexions extensibles améliorent la compatibilité mécanique et permettent aux surfaces de détection de rester fonctionnelles lors de la flexion et de la déformation répétée. Cette compatibilité mécanique affecte non seulement le confort, mais aussi la fiabilité du signal et la durée de vie.
Les interfaces neurales directes introduisent une autre couche de complexité. Une fois la sortie du capteur destinée aux nerfs périphériques, aux voies spinales ou aux systèmes corticaux, les ingénieurs doivent répondre à plusieurs exigences étroitement liées.
• Synchronisation précise
• Stimulation sûre
• Stabilité d'interface à long terme
Le défi est donc double. Le capteur doit détecter les événements externes avec précision, et l'interface doit fournir ces événements sous une forme que l'utilisateur peut apprendre progressivement et sur laquelle il peut compter avec confiance. En pratique, la confiance se renforce lorsque les retours restent cohérents lors de tâches répétées. Même une interface techniquement sophistiquée peut être mise de côté si ses réponses changent de manière notable avec la sueur, le mouvement des prises, ou l'usure mécanique habituelle.
Obstacles Restants à l'Adoption des Prothèses
Malgré des progrès considérables, plusieurs obstacles ralentissent encore l'adoption plus large.
• Biocompatibilité à long terme
• Efficacité énergétique
• Dérive du signal
• Calibration individualisée
Un autre problème persistant est que le toucher prothétique est souvent évalué dans des conditions d'essai contrôlées qui ne reflètent pas pleinement la vie quotidienne. Le succès en laboratoire avec des objets standards ne s'étend pas automatiquement aux surfaces humides, aux températures changeantes, ou aux mouvements rapides et imprévus. Une stratégie de développement plus mature devrait inclure dès le départ la diversité des tâches du monde réel plutôt que de la traiter comme quelque chose à examiner uniquement à la fin.
Capteurs Tactiles dans l'Automatisation Industrielle
Dans l'automatisation industrielle, la détection tactile renforce les performances robotiques en ajoutant une conscience physique au poignet, à la prise, ou à l'effecteur final. Cette couche supplémentaire de perception permet aux machines de faire plus que suivre des trajectoires géométriques. Elles peuvent répondre aux conditions de contact réelles, ajuster la force lors de l'assemblage, détecter des obstacles inattendus, et manipuler des pièces délicates avec une plus grande précision. À mesure que les environnements de production deviennent plus rapides et plus variables, la détection tactile est de plus en plus considérée comme faisant partie d'une base d'ingénierie robuste plutôt que comme un complément optionnel.
Une large gamme de tâches industrielles bénéficie du retour tactile.
• Assemblage robotique
• Insertion
• Polissage
• Préhension
• Inspection de surface
Dans les tâches d'insertion, par exemple, la vision peut fournir un alignement approximatif, mais le succès final dépend souvent de subtils changements de force qui révèlent la direction du contact, le frottement, ou le blocage. Dans le polissage ou le déburring, le maintien d'une pression de contact appropriée façonne directement la qualité de surface et la longévité de l'outil. Dans la préhension, la détection tactile aide à détecter un glissement incipient avant qu'un objet ne soit perdu. Ces exemples montrent que le toucher complète la vision en fournissant une réalité physique locale où les informations de ligne de vue restent incomplètes ou ambiguës.
Contrôle en Boucle Fermée et Intelligence de Contact
L'une des contributions les plus claires de la détection tactile dans l'automatisation réside dans le contrôle en boucle fermée. Une fois les informations de force et de contact disponibles en temps réel, les robots peuvent ajuster la rigidité, la vitesse et la trajectoire en fonction de l'état de la tâche. Cela soutient l'ajustement de conformité, la détection de collisions et la manipulation adaptative. L'effet plus large est que la détection tactile déplace un robot d'un exécuteur préprogrammé vers un système physiquement réactif.
Un schéma révélateur provenant des environnements de déploiement est que de nombreux échecs de contact ne proviennent pas d'une force insuffisante du robot ou d'une planification géométrique inadéquate, mais d'un retour local manquant. Une prise peut appliquer une force inappropriée non pas parce que le contrôleur manque de capacité, mais parce qu'il n'a aucune indication fiable de changement de frottement, de désalignement de pièce, ou de déformation de surface. Dans ces situations, même une modeste couche tactile peut améliorer la performance de manière plus notable qu'un actionneur plus puissant. Cela suggère qu'une gestion du contact plus intelligente commence souvent par une meilleure détection avant que des mécanismes plus agressifs ne soient envisagés.
Sécurité et Interaction Humain-Robot
Dans la fabrication collaborative, la détection tactile améliore également la sécurité. Les robots qui détectent rapidement un contact inattendu sont mieux positionnés pour limiter la force d'impact, arrêter le mouvement, ou passer à un comportement conforme. Cela devient particulièrement pertinent dans des espaces de travail partagés où les opérateurs et les machines travaillent à proximité. La sécurité dans ce cadre va au-delà des arrêts d'urgence. Elle comprend également la réduction des quasi-accidents, la limitation des collisions mineures, et la possibilité d'une coopération plus fluide lors de la transmission ou de l'assemblage assisté.
D'un point de vue technique, la difficulté réside dans l'équilibre entre sensibilité et robustesse. Les capteurs doivent détecter un contact significatif sans déclencher d'alarmes fausses constantes dues aux vibrations, au bruit des outils, ou aux variations de processus normales. Dans les lignes de production réelles, des systèmes trop sensibles peuvent devenir frustrant en raison de leur impraticabilité, car ils interrompent le flux de travail et érodent la confiance de l'opérateur. C'est pourquoi les systèmes tactiles industriels efficaces combinent généralement une logique de seuil, un filtrage, et une interprétation spécifique à la tâche au lieu de se fier uniquement à la sortie brute des capteurs.
Évolutivité et Contraintes Environnementales Difficiles
Les environnements industriels imposent des exigences strictes en matière de durabilité, de stabilité de calibration, et de coût de maintenance.
• Poussière
• Huile
• Variation de température
• Impacts répétés
• Bruit électromagnétique
Ces facteurs peuvent dégrader progressivement ou brutalement les performances du capteur. Un capteur qui fonctionne bien sur une plateforme de recherche propre peut rencontrer des difficultés dans une cellule de fabrication à cycles élevés. Pour cette raison, l'adoption industrielle dépend non seulement de la capacité de détection, mais aussi de l'emballage, de l'étanchéité, de la remplaçabilité et de la transparence des diagnostics.
L'évolutivité présente un autre défi. Un réseau tactile à haute résolution peut fournir d'excellentes données, mais son attrait pratique diminue si l'entretien est coûteux ou si l'intégration avec les contrôleurs existants devient lourde. Dans de nombreux établissements, la solution préférée n'est pas celle qui offre la sortie de données la plus riche, mais celle qui continue de fonctionner avec une recalibration minimale et moins de surprises. La fiabilité dans des conditions imparfaites reste l'un des signes les plus convaincants de la maturité de l'ingénierie.
Capteurs tactiles dans l'électronique portable
Dans l'électronique portable, les capteurs tactiles fonctionnent comme des couches de détection distribuées qui surveillent la force, la température, l'humidité, le mouvement et d'autres signaux environnementaux ou physiologiques. Leur rôle s'élargit de la simple collecte de données à une interaction soutenue entre le corps, l'appareil et l'environnement environnant. Cela a positionné la détection tactile comme un composant majeur de la peau électronique, des vêtements intelligents, des dispositifs de réhabilitation et des plateformes de surveillance de la santé.
Le développement de substrats flexibles et de circuits extensibles a considérablement amélioré le confort et l'adaptabilité des systèmes portables. Plusieurs classes de matériaux sont fréquemment utilisées car elles combinent fonctionnalité électrique et conformité mécanique.
• Graphène
• Nanotubes de carbone
• Oxyde de zinc
• Polymères conducteurs
• Métaux liquides
Ces matériaux permettent aux capteurs de plier, s'étirer et s'adapter à des surfaces irrégulières tout en maintenant la sensibilité et la continuité du signal. L'adaptabilité mécanique est très importante car un dispositif portable doit fonctionner sous déformation constante plutôt que dans des conditions de laboratoire statiques et soigneusement contrôlées.
Innovation matérielle et expansion fonctionnelle
L'innovation matérielle a élargi la détection tactile de la détection à un seul paramètre à une perception multimodale. Les dispositifs portables modernes visent de plus en plus à détecter plusieurs types de signaux au sein d'une seule plateforme intégrée.
• Pression
• Déformation
• Chaleur
• Humidité
• Changements biochimiques
Cela permet une interprétation plus riche de l'état et de l'environnement de l'utilisateur. Par exemple, les données de pression seules peuvent indiquer un contact, tandis que la pression combinée avec la température et l'humidité peut aider à distinguer l'exercice, le stress, l'exposition environnementale ou un mauvais ajustement de l'interface.
Cependant, la détection multimodale introduit également une nouvelle complexité. À mesure que des canaux de détection supplémentaires sont ajoutés, le crosstalk des signaux devient une préoccupation sérieuse. Un changement de température peut altérer un signal de pression, et une déformation mécanique peut perturber les pistes électriques destinées à la détection de l'humidité. Cela signifie qu'ajouter des fonctions n'améliore pas automatiquement la conception. Dans de nombreux cas, la qualité de la conception est jugée par la manière dont différentes modalités sont isolées, calibrées et fusionnées de manière propre.
Intégration au niveau système dans les plateformes portables
La conception portable actuelle est de plus en plus centrée sur l'intégration complète du système. Les capteurs sont désormais combinés avec des unités fonctionnelles supplémentaires.
• Modules d'alimentation
• Unités de communication sans fil
• Circuits de traitement de signal
• Micro-actuateurs pour sortie haptique ou réponse thérapeutique
Ce changement reflète une vérité pratique : un capteur seul ne produit pas un système portable que les gens continueront à utiliser. La véritable valeur apparaît uniquement lorsque la détection, le calcul, la transmission et le retour d'information fonctionnent comme une seule plateforme coordonnée.
Dans l'utilisation réelle, les problèmes d'intégration émergent souvent avant que les limites de détection ne se manifestent. Un dispositif peut montrer une excellente sensibilité, mais devenir néanmoins peu pratique en raison de l'encombrement de la batterie, d'un transfert sans fil instable, d'irritations cutanées ou de perte de signal pendant le mouvement. Pour cette raison, les conceptions portables les plus convaincantes montrent souvent de la retenue. Elles recherchent une performance équilibrée, un fonctionnement à faible consommation d'énergie et un confort mécanique plutôt que de poursuivre des métriques de pointe isolées. Un dispositif que les gens sont vraiment prêts à porter tous les jours dépasse souvent un modèle techniquement supérieur qui finit oublié dans un tiroir.
Durabilité et défis d'utilisation à long terme
Les flexions, torsions, sueurs et expositions aux variations de température répétées créent un stress cumulatif dans les systèmes portables. La fatigue des matériaux peut mener à plusieurs voies de dégradation.
• Microfissures
• Délamination
• Perte de conductivité
• Dérive de calibration
De plus, un désaccord parmi les propriétés thermiques, mécaniques et électriques des matériaux superposés peut produire une instabilité à long terme. Ces modes de défaillance sont particulièrement difficiles car ils peuvent rester cachés pendant de courts cycles d'essai, mais ils déterminent souvent la durée de vie réelle du produit.
La performance à long terme devrait donc être considérée comme un objectif de conception précoce plutôt que comme un élément de vérification en fin de processus. Les dispositifs destinés à un usage quotidien nécessitent plus qu'une sensibilité initiale prometteuse. Ils bénéficient de tests de fatigue accélérés, d'une évaluation de l'adhérence, de stratégies d'encapsulation et d'algorithmes de compensation de dérive. En pratique, la durabilité sépare souvent un prototype attrayant d'un produit pouvant rester en service avec moins de compromis.
Défis transversaux et orientations futures
Bien que les prothèses, l'automatisation et les dispositifs portables diffèrent par leurs objectifs d'application, elles partagent plusieurs défis fondamentaux.
• Améliorer la fidélité du signal
• Réduire le bruit et le couplage
• Augmenter la durabilité mécanique
• Réduire la consommation d'énergie
• Obtenir une intégration plus étroite entre détection et prise de décision
Dans ces trois domaines, le secteur évolue vers des plateformes plus petites, plus intelligentes, plus souples et plus autonomes.
Une tendance notable est le passage d'une détection passive à une perception active. Les futurs systèmes tactiles ne se contenteront pas d'enregistrer la pression. Ils interpréteront le contexte, anticiperont les résultats des interactions et adapteront le comportement en temps réel. Cela pourrait impliquer plusieurs capacités émergentes.
• Informatique en périphérie locale
• Auto-calibrage
• Récupération d'énergie
• Communication orientée événements
Les avancées ayant la plus grande influence proviendront probablement d'architectures qui raccourcissent la distance entre détection, traitement et réponse.
Une autre direction majeure est l'opération autosuffisante. À mesure que les dispositifs tactiles deviennent plus distribués et mobiles, la dépendance à un chargement fréquent ou à des unités d'alimentation encombrantes devient une contrainte de plus en plus sérieuse. L'électronique économe en énergie, le stockage flexible, la récupération triboélectrique et les circuits neuromorphiques à faible consommation d'énergie joueront probablement un rôle plus important. Une plateforme tactile devient beaucoup plus pratique une fois qu'elle peut rester fiable sans exiger une attention constante de la part de l'utilisateur.
La prochaine percée majeure ne viendra probablement pas seulement de la sensibilité, car de nombreux capteurs offrent déjà une sensibilité suffisante pour des démonstrations contrôlées. Le tournant plus significatif arrivera lorsque les systèmes tactiles uniront une détection de haute qualité avec durabilité, interprétabilité et intégration transparente dans les tâches quotidiennes. Le secteur approche d'un stade où le succès sera jugé moins par la possibilité de mesurer le toucher, et plus par la capacité d'utiliser ce toucher de manière naturelle, continue et à grande échelle.
Conclusion
Les capteurs tactiles comblent le fossé entre le contact physique et l'intelligence machine en convertissant les interactions liées au toucher en informations significatives. Une détection tactile efficace dépend non seulement de la sensibilité mais aussi de la stabilité du signal, de la calibration et de l'interprétation fiable dans des conditions réelles de fonctionnement. Alors que la robotique, l'automatisation et les systèmes intelligents continuent d'avancer, les capteurs tactiles resteront essentiels pour améliorer la manipulation des objets, la sensibilisation à l'environnement et l'interaction humaine-machine sécurisée.
Questions Fréquemment Posées [FAQ]
1. Pourquoi la reconnaissance tactile est-elle souvent plus difficile que la détection tactile dans les systèmes robotiques ?
La détection tactile se concentre sur la mesure des informations de contact physique telles que la force, la pression, la position ou le glissement. La reconnaissance est plus difficile car elle doit interpréter ces mesures pour déterminer les propriétés de l'objet, la forme, la dureté ou l'état de prise. La précision de la reconnaissance dépend fortement de la qualité des données de détection, la rendant plus sensible au bruit, à la dérive et aux conditions de contact changeantes.
2. Pourquoi le développement des capteurs tactiles est-il passé de l'amélioration du matériel aux algorithmes de traitement du signal et de perception ?
À mesure que la technologie des capteurs mûrissait, les chercheurs se sont rendu compte que les signaux tactiles bruts seuls fournissent une valeur limitée. Des informations utiles émergent seulement après calibration, filtrage, extraction de caractéristiques et interprétation. Ce changement a conduit à un plus grand accent sur le traitement des données, permettant aux robots d'identifier des surfaces, de détecter le glissement, d'estimer les propriétés des objets et de prendre des décisions de contrôle intelligentes plutôt que de simplement mesurer la force.
3. Comment les capteurs de glissement améliorent-ils la performance de saisie robotique par rapport aux capteurs de force seuls ?
Les capteurs de force peuvent mesurer la quantité de force appliquée à un objet, mais ils n'indiquent pas toujours si l'objet commence à se déplacer. Les capteurs de glissement détectent le mouvement relatif à la surface de contact et peuvent identifier le micro-glissement avant qu'un objet ne tombe. Cet avertissement précoce permet au système de contrôle d'ajuster la force de préhension en temps réel et de maintenir une prise stable.
4. Pourquoi n'existe-t-il pas une seule technologie de détection tactile qui fonctionne le mieux pour chaque application ?
Chaque méthode de détection implique différents compromis. Les capteurs piézorésistifs sont rentables et faciles à intégrer, les capteurs capacitifs offrent une haute sensibilité, les capteurs optiques fournissent des informations spatiales détaillées, les capteurs piézoélectriques excellent dans la détection d'événements dynamiques, et les capteurs magnétiques soutiennent une détection multidirectionnelle. Le meilleur choix dépend de facteurs tels que les exigences de sensibilité, les conditions environnementales, la durabilité, le coût et les besoins d'intégration du système.
5. Quels facteurs poussent le développement futur de la technologie des capteurs tactiles ?
Les systèmes tactiles futurs devraient se concentrer sur la détection multidirectionnelle, des matrices de capteurs à résolution plus élevée, une intégration plus étroite avec les systèmes de contrôle et une interprétation des signaux plus intelligente. Les développements émergents tels que l'informatique en périphérie, l'auto-calibration, la récupération d'énergie et le traitement neuromorphique visent à créer des plates-formes tactiles capables de fonctionner de manière plus fiable, efficace et autonome dans des environnements réels.
Blog connexe
-
Fiche technique MOSFET IRLZ44N, circuit, équivalent, épingle
![Fiche technique MOSFET IRLZ44N, circuit, équivalent, épingle]()
2024/08/28
L'IRLZ44N est un MOSFET de puissance à nailaux N largement utilisé.Renommé pour ses excellentes capacités de commutation, il est très adapté à ... -
Combien de zéros dans un million, des milliards de milliards de billions?
![Combien de zéros dans un million, des milliards de milliards de billions?]()
2024/07/29
Des millions représentent 106, un chiffre facilement saisissable par rapport aux articles quotidiens ou aux salaires annuels. Milliards, équivalent ... -
Température de la batterie trop basse, la charge s'est arrêtée.Comment le réparer?
![Température de la batterie trop basse, la charge s'est arrêtée.Comment le réparer?]()
2024/10/6
Les problèmes de charge de batterie de téléphone portable sont courants mais peuvent être gérés efficacement.La température joue un rôle impor... -
BC547 Guide complet du transistor
![BC547 Guide complet du transistor]()
2024/07/4
Le transistor BC547 est couramment utilisé dans une variété d'applications électroniques, allant des amplificateurs de signal de base aux circuits... -
Un guide complet des multiplexeurs et leur rôle dans les systèmes numériques
![Un guide complet des multiplexeurs et leur rôle dans les systèmes numériques]()
2025/09/20
Les multiplexeurs sont des composants des systèmes numériques, conçus pour canaliser plusieurs signaux d'entrée dans une seule ligne de sortie en ... -
Guide complet du SCR (redresseur contrôlé en silicium)
![Guide complet du SCR (redresseur contrôlé en silicium)]()
2024/04/22
Les redresseurs contrôlés en silicium (SCR), ou thyristors, jouent un rôle central dans la technologie de l'électronique de puissance en raison de... -
LR621, SR621SW, 364, équivalents de batterie AG1 et remplacements
![LR621, SR621SW, 364, équivalents de batterie AG1 et remplacements]()
2024/07/15
Les batteries de bouton LR621 et SR621SW sont répandues dans des appareils électroniques compacts comme les montres, les petits jouets, les calculat... -
CR2450 vs CR2032 Comparaison: tout ce que vous devez savoir
![CR2450 vs CR2032 Comparaison: tout ce que vous devez savoir]()
2025/09/15
Les batteries de bouton comme CR2450 et CR2032 alimentent de nombreux appareils électroniques de tous les jours, des montres et télécommandes aux d... -
Fondamentaux des circuits d'amplificat
![Fondamentaux des circuits d'amplificat]()
2023/12/28
Dans le monde complexe de l'électronique, un voyage dans ses mystères nous conduit invariablement à un kaléidoscope de composants de circuit, à l... -
Comparaison des différences et applications des NMOS et PMO
![Comparaison des différences et applications des NMOS et PMO]()
2024/11/15
Comprendre les différences entre les transistors NMOS et PMOS est important pour concevoir des circuits efficaces.Les NMOS (N-Type Metal-Oxide-Semico...










Pièces chaudes
- TY00680002ARGQ
- AT28HC256E-12JI
- TA2149BFNG
- TPS2310IPW
- 1206AC562KAT1A
- USB5534B-6080JZX
- 1808SC102JAT1A
- PM7385-BI
- IS89C54-40PL
- VT212BX-ADJ-001
- LTC1093ACN
- NRS8040T4R7NJGJ
- 04025A390GAT2A
- AT49BV001ANT-55JI
- LM3704XCMM-308
- 08055A7R5CAT2A
- EHR-10
- XG4A-1031
- GRM1885C1E132JA01D
- TS5A22364DGSR
- MC44251FN
- ADET-5000-TR1
- BH76806FVM-TR
- SKKT106/14E
- AD9746BCPZ
- UMK325F475ZH-T
- RT0603DRD0711KL
- FDPF18N50T
- ADS58H40IZCR
- LE25FW056CS-TRM-E
- TAJC476K006Y
- MAX9737ETG+
- UCC28C40DR
- M38D24G6-063FP
- HD64F38024H
- Z3P1GF3FGF-GDJ
- ADUM3402BRWZ-RL
- S25FL128SAGMFI00
- MAX3223EEAP+T
- T491D476M020AT7454
- ISP752TFUMA1
- MACH230-10JC
- TMS570LS1203BPGEQQ1
- BR2032
- 3FB42FXZZ-TXRF
- ML7083-205D41TB-CS
- SII9244B0TR
- EM6GC08EWUE-12H
- KMRX1000AM-A614
- TA7808S(Q)